Deje que las pilas de laminación de Sino potencien su proyecto.
Para agilizar su proyecto, puede etiquetar las pilas de laminación con detalles como tolerancia, material, acabado superficial, si se requiere o no aislamiento oxidado, cantidady mucho más.
¿Cómo funciona un servomotor? Una guía sencilla para robots y fábricas
Un servomotor hace que las cosas se muevan con un movimiento muy exacto. ¿Cómo sabe un brazo robótico cuál es el lugar adecuado para detenerse? ¿Cómo mueve los alerones un avión? Aprendí que la respuesta era el servomotor. En este post, te contaré lo que aprendí sobre el funcionamiento de estas grandes herramientas. Veremos el mecanismo de retroalimentación que les permite moverse con tanta exactitud. También veremos sus numerosas aplicaciones industriales.
Índice
¿Qué es un servomotor y por qué es importante?
Básicamente, un servomotor es un tipo especial de motor. Te permite controlar el punto exacto de su parte giratoria. Puedes controlar su posición angular o lineal. También puedes controlar lo rápido que se mueve y acelera, que son su velocidad y aceleración. Un motor de corriente continua normal sólo gira y gira. Pero un servomotor es diferente. Se le puede ordenar que vaya a un punto determinado y mantenga esa posición.
Esta habilidad proviene de una configuración inteligente llamada sistema de control de bucle cerrado. Funciona así: Le dices al servomotor una posición a la que moverse. El servomotor se desplaza hasta allí. A continuación, un sensor situado en el interior del motor indica a un controlador que se encuentra en el lugar correcto. Este proceso de comprobación constante es la razón por la que los servomotores pueden ser tan exactos. Si estás construyendo un robot, una máquina CNC, o cualquier cosa que deba moverse al lugar correcto, debes aprender cómo funciona un servomotor.
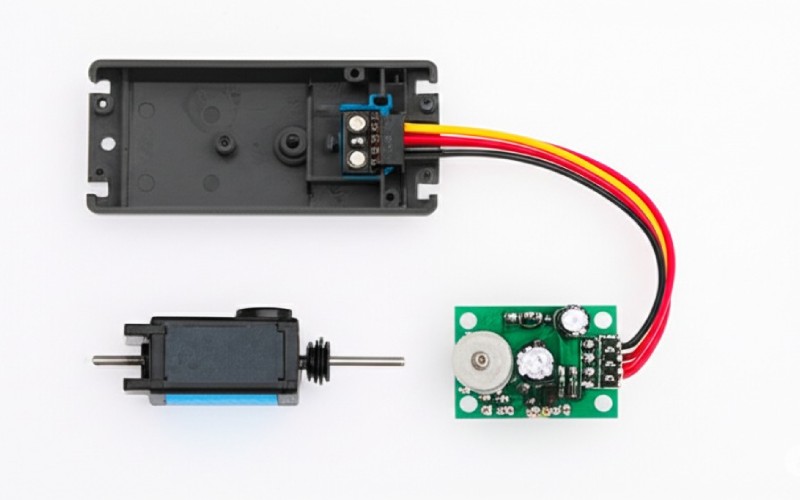
¿Qué hay dentro de un servomotor?
Si abre un servomotor, verá unas cuantas piezas principales que trabajan en equipo. Es una herramienta pequeña pero inteligente.
Un motor normal, como un motor de CA o CC.
Unos engranajes para controlar su velocidad y su par, que es su fuerza de giro.
Un sensor que conoce la posición. Suele ser un potenciómetro o un codificador.
Un circuito de control, que es la electrónica de control. Lee el sensor y le dice al motor lo que tiene que hacer.
El motor proporciona la potencia. Los engranajes dan al motor más fuerza de giro, que es el par motor. El sensor y el circuito de control actúan como el cerebro. La unión de estas piezas es lo que hace que un servomecanismo funcione tan bien en robótica y automatización. El eje del motor se conecta a los engranajes. Los engranajes se conectan a la pieza giratoria que ves en el exterior.
¿Cómo funciona el mecanismo de retroalimentación de bucle cerrado?
Ésta es la parte más especial del funcionamiento de un servomotor. La idea de un sistema de control de bucle cerrado es lo que diferencia a los servomotores de otros motores. Piensa en aparcar un coche. Quieres estar a un pie del borde de la carretera. Mirarías para ver a qué distancia estás y luego fijarías tu posición. Estás utilizando tus ojos para comprobar y corregir tu trabajo.
Un servomotor hace lo mismo. El controlador envía un mensaje, o señal de control, al motor. Este mensaje le dice que se mueva a un punto determinado, que es la posición deseada. A medida que el motor gira, el sensor (el potenciómetro o codificador) siempre está leyendo la posición del eje. Esta información vuelve al controlador. El controlador mira la posición actual y la posición deseada. Si no coinciden, sigue enviando potencia al motor. Se detiene cuando las dos posiciones coinciden. Este sistema de comprobación y corrección constantes es el mecanismo de realimentación. Ayuda al servomotor a mantener su posición con gran precisión.
¿Cómo se controla un servomotor?
He descubierto que no se puede simplemente conectar una batería a un servomotor. No empezará a girar sin más. Un servomotor necesita un conjunto especial de instrucciones para entender las órdenes. Estas instrucciones se llaman Modulación de Ancho de Pulso, o PWM.
Una señal PWM es un grupo de ráfagas cortas de electricidad. El servomotor espera recibir una de estas ráfagas, o un pulso, cada 20 milisegundos. Lo que importa es la duración del pulso, no cuánta electricidad tiene. La duración de este impulso eléctrico indica al eje del motor dónde debe girar.
Un pulso que dura 1 milisegundo suele indicar al servomotor que gire completamente hacia un lado (0 grados).
Un impulso de 2 milisegundos le indica que gire completamente hacia el otro lado (180°).
Un impulso que dura 1,5 milisegundos le indica que se desplace al punto medio (90 grados).
Enviando el impulso eléctrico adecuado, podemos conseguir un control muy preciso del eje del motor. Muchos proyectos divertidos utilizan controladores como un Arduino. Puedes añadir un escudo servo a estas placas. Esto facilita el control de varios servomotores a la vez.
¿Cuáles son los principales tipos de servomotores?
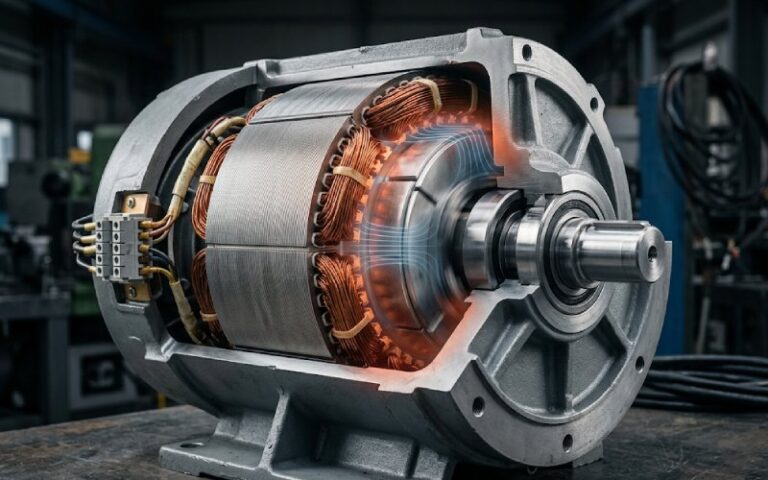
Cuando busque un servomotor, verá que existen varios tipos principales. Los dos tipos más comunes de servomotores son los servos de CA y los servos de CC.
Pieza
Servomotor de CA
Servomotor de CC
Potencia
Corriente alterna (CA)
Corriente continua (CC)
Cómo funciona
Utiliza una corriente alterna para crear un campo magnético giratorio.
Utiliza escobillas y una pieza llamada colector, o puede ser sin escobillas.
Lo mejor para
Trabajos que requieren movimientos muy exactos, aplicaciones industriales y cosas pesadas.
Proyectos más sencillos que cuestan menos, como robótica para aficionados y pequeñas herramientas.
Cosas buenas
Funciona muy bien, no necesita muchas reparaciones, tiene un alto par motor.
Fácil de controlar, cuesta menos dinero.
Cosas malas
Es más complejo y cuesta más.
No es tan eficaz. Los cepillos pueden envejecer y causar desgaste.
También existen servomotores lineales. Éstos se mueven en línea recta en lugar de en círculo. También hay servomotores de rotación continua. Estos pueden girar todo el camino alrededor como un motor normal, pero usted puede controlar su velocidad. La elección del servomotor correcto se basa en las necesidades de tu proyecto. Piensa en la potencia, la exactitud que necesita y tu presupuesto. Por ejemplo, las grandes máquinas CNC suelen utilizar servomotores que son fuertes servomotores de CA.
¿Qué es un potenciómetro en un servomotor?
En muchos servos normales, el sensor de posición es un potenciómetro. Esto es especialmente cierto para los servos utilizados en proyectos de hobby. Un potenciómetro es un tipo de resistencia que puede cambiar. Tiene una perilla que puedes girar. Cuando lo giras, la cantidad de resistencia eléctrica cambia.
En el interior del motor, el potenciómetro está unido al último engranaje. Cuando el eje del motor gira, el potenciómetro también gira. El circuito de control hace pasar una tensión a través del potenciómetro. Luego lee la tensión que sale. La tensión de salida es diferente en función de la posición del eje. Esto indica al circuito el punto exacto del eje en cada momento. Esta es una manera simple pero buena para que el servo sistema obtenga su retroalimentación.
¿Qué es un codificador y un resolutor?
Para los trabajos de fábrica más duros, un potenciómetro puede no ser lo suficientemente exacto. Para estos trabajos, un servomotor utilizará un codificador o un resolver como sensor.
Un codificador es un sensor que transforma el movimiento en un mensaje eléctrico. Puede indicar al controlador algo más que la posición. También puede informar de la velocidad y la dirección del eje del motor. Existen dos tipos principales:
Codificador incremental: Este tipo informa al controlador sobre cambia en posición. Siempre se necesita un punto de partida para que funcione.
Codificador absoluto: Este tipo proporciona la posición angular exacta en todo momento. Conoce la posición incluso si se corta la alimentación y se vuelve a conectar.
Un resolver es otro tipo de sensor. Es muy resistente y suele utilizarse en lugares rugosos o sucios. Al igual que un codificador, proporciona información sobre la posición del eje. Ambos sensores son mucho más precisos que un potenciómetro. Por eso los verás en máquinas de robótica y automatización de alto nivel.
¿Dónde se utilizan los servomotores?
Después de aprender qué es un servomotor, empezará a verlos en muchos lugares. La lista de aplicaciones de los servomotores es muy larga. Esto se debe a que muchas cosas necesitan moverse de una manera muy exacta.
He aquí algunos lugares en los que se utilizan servos:
Robótica: Cada articulación de un brazo robótico puede tener un servomotor. Esto le permite controlar su posición. Esto es válido tanto para un gran robot industrial como para un pequeño robot de aficionado. Una pinza de un robot utiliza un servomotor para abrirse y cerrarse con la fuerza adecuada.
Aplicaciones industriales: En las fábricas, los servomotores se utilizan para accionar cintas en movimiento, máquinas que llenan botellas y máquinas CNC. Su velocidad y precisión hacen posible la automatización de las fábricas.
Vehículos teledirigidos: Un avión teledirigido utiliza servos para mover las pequeñas alas. Un coche teledirigido utiliza un servo para dirigir. Este es un uso muy común en aplicaciones de hobby.
Dispositivos médicos: Los servomotores se utilizan en herramientas hospitalarias como escáneres y robots para cirugía. En estas herramientas, ser exacto es muy importante.
Electrónica común: Incluso puedes encontrar un pequeño servomotor en cosas como una cámara. Su función es hacer que la imagen sea nítida mediante pequeños cambios exactos.
Desde la primera vez que se utilizó el vapor para controlar los timones de los barcos hasta la robótica actual, la idea principal del servomecanismo sigue siendo una excelente forma de controlar una máquina.
¿Cuál es la diferencia entre servomotores y motores paso a paso?
Cuando empezaba a aprender, solía confundir los servomotores con los motores paso a paso. Ambos se utilizan para controlar la posición. Pero hacen su trabajo de formas muy distintas.
Un motor paso a paso se mueve en pequeños pasos fijos. No tiene mecanismo de realimentación. Le dices que se mueva un número de pasos y lo hace. Se trata de un sistema de "bucle abierto", lo que significa que hace lo siguiente
Comparte tu aprecio
Charlie
Cheney es un ingeniero de aplicaciones sénior de Sino con una gran pasión por la fabricación de precisión. Es Ingeniero Mecánico y posee una amplia experiencia práctica en fabricación. En Sino, Cheney se centra en optimizar los procesos de fabricación de pilas de laminación y en aplicar técnicas innovadoras para conseguir productos de pilas de laminación de alta calidad.
Folleto de nuevos productos
Introduzca su dirección de correo electrónico y le enviaremos el folleto más reciente.
Deje que las pilas de laminación de Sino potencien su proyecto.
Para agilizar su proyecto, puede etiquetar las pilas de laminación con detalles como tolerancia, material, acabado superficial, si se requiere o no aislamiento oxidado, cantidady mucho más.