Deje que las pilas de laminación de Sino potencien su proyecto.
Para agilizar su proyecto, puede etiquetar las pilas de laminación con detalles como tolerancia, material, acabado superficial, si se requiere o no aislamiento oxidado, cantidady mucho más.
Cómo elegir un servomotor: Guía de los principales aspectos a tener en cuenta
Elegir el servomotor equivocado es un error fácil de cometer. Pero puede costarle tiempo y dinero. También puede causar muchos problemas. Este artículo es mi guía para ayudarle a mantenerse alejado de esos problemas. Te mostraré las principales cosas en las que debes pensar. Hablaremos de todo, desde la velocidad y el par motor hasta la inercia y el software. Cuando termine de leer, sabrá cómo seleccionar un servomotor que sea la elección correcta para su trabajo.
Índice
¿Qué es un servomotor y por qué es tan importante?
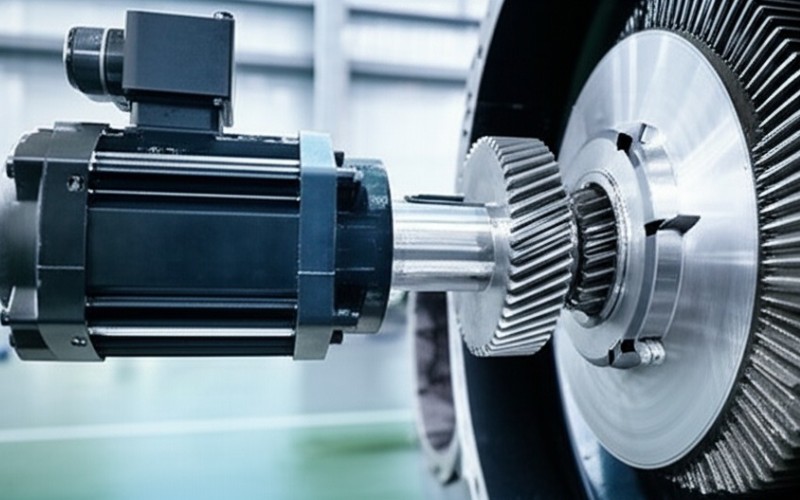
Empecemos por los hechos. Un servomotor es un tipo especial de motor eléctrico. Está hecho para un control muy exacto de su posición, su velocidad y lo rápido que se pone en marcha. Imagine un brazo robótico en una fábrica. Tiene que moverse al mismo sitio una y otra vez. Ese es el trabajo de un servomotor. Utiliza una herramienta de retroalimentación, como un codificador. Esta herramienta indica a un controlador dónde se encuentra. Esto hace que sus movimientos sean muy exactos y fiables.
No se puede tener un servomotor sin un servoaccionamiento. El servomotor es como el cerebro de todo el sistema. Recibe una orden, como "muévete al punto X a la velocidad Y". A continuación, envía la cantidad adecuada de tensión y potencia al servomotor para que esto suceda. El servomotor también comprueba la respuesta del motor. Esto asegura que el motor está haciendo lo que se le dijo que hiciera. Un buen servoaccionamiento y un buen servomotor trabajando juntos son el punto de partida de cualquier gran sistema de control de movimiento.
¿Cómo empezar a elegir un servomotor para su trabajo?
El primer paso es conocer a fondo su aplicación. Antes incluso de estudiar un servomotor, tiene que definir lo que quiere hacer. ¿Cuál es la finalidad de su máquina? ¿Qué intenta mover? Esta es la parte más importante de todo el proceso. Un error en este punto causará problemas en el futuro. Para su aplicación exacta, debe conocer todos los detalles.
Hágase estas preguntas sobre su solicitud:
¿Cuál es la carga? ¿Cuánto pesa el objeto, o carga útil, que vas a desplazar?
¿Cómo se moverá? ¿Se moverá en línea o girará? ¿Será un simple movimiento de vaivén o un perfil más complejo?
¿Cómo es el entorno? ¿Estará el servomotor en un lugar caliente, frío, húmedo o lleno de polvo? El entorno es un factor muy importante.
¿Cuál es la configuración física? ¿Utiliza piezas como correas, tornillos o un sistema de transmisión directa? Cada uno de ellos tiene necesidades diferentes para la aplicación.
Si describe su solicitud de forma clara, obtendrá una lista de las cosas que necesita. Esta lista es su guía. Le ayudará a seleccionar el servomotor adecuado para su aplicación de automatización. Esta es la base para un proyecto que funcione bien. Si no tiene una idea clara de la aplicación, en realidad sólo está haciendo conjeturas.
¿Cómo calcular la velocidad y el par necesarios?
Una vez comprendida la aplicación, hay que calcular la velocidad y el par. El par es una fuerza de giro. Se puede considerar como la "fuerza" que debe tener el servomotor. La velocidad es la rapidez con la que el motor debe girar para realizar el movimiento en el tiempo disponible. Usted debe calcular estos números para su aplicación exacta.
Debe conocer dos tipos de par para su aplicación:
Tipo de par
Qué significa
Par continuo
Es la cantidad de fuerza de giro que el servomotor puede realizar durante todo el día sin necesidad de pararse o sobrecalentarse. También se conoce como par nominal.
Par máximo
Esta es la mayor fuerza de giro que el servomotor puede hacer durante un corto periodo de tiempo. Se necesita para poner la carga en movimiento (aceleración) o para detenerla rápidamente.
Tendrás que calcular los requisitos de par para cada parte del ciclo de movimiento. Esto significa encontrar el par necesario para acelerar la carga. También incluye el par necesario para moverse a una velocidad constante (para vencer la fricción). Y se necesita el par necesario para ralentizar el movimiento. El par máximo necesario en cada momento será el par máximo requerido. El par medio a lo largo de todo el ciclo ayuda a determinar el par continuo necesario. Conocer sus requisitos de velocidad y par es un paso muy importante para seleccionar un servomotor.
¿Qué es la inercia y por qué es tan importante igualar la inercia?
Inercia es una palabra que puede parecer difícil de entender, pero la idea no lo es. La inercia es lo mucho que un objeto no quiere cambiar su velocidad. Una pelota pesada tiene más inercia que una ligera. Es más difícil ponerla en marcha y más difícil hacer que se detenga. En un servosistema, nos preocupamos por la inercia de la carga. También nos importa la inercia de la parte móvil del servomotor, el rotor. La relación entre estos dos se conoce como la relación de inercia.
Para que el sistema funcione bien, es muy importante que la inercia sea la correcta. La relación de inercia es la inercia de la carga dividida por la inercia del motor. Una buena regla general es mantener esta relación por debajo de 10 a 1. Por ejemplo, si la inercia del motor es 1, la inercia de la carga debe ser 10 o menos. Si la relación es demasiado alta, el servomotor tendrá muchas dificultades para controlar la carga. Es como intentar controlar un objeto muy pesado con un músculo muy pequeño. El sistema podría ir más allá de su objetivo, temblar, y tener dificultades para ser exacto.
Una mala relación de inercia es un reto habitual. Puede calcular la inercia de la carga basándose en la forma y el peso de cada pieza móvil de su aplicación. Si su relación de inercia es demasiado alta, no se preocupe. Hay una gran solución. Utilizar un reductor de engranajes es una forma estupenda de mejorar la adaptación de la inercia. Este sencillo componente puede marcar una gran diferencia en la capacidad de su servomotor para soportar la carga.
¿Cómo se puede leer una curva de velocidad-par para ver lo que puede hacer un motor?
Cada servomotor tiene una curva de velocidad-par. Este gráfico es una de las herramientas más importantes que utilizará. La curva le muestra lo que el servo motor es capaz de hacer. Te dice cuanta fuerza de giro puede hacer el motor a diferentes velocidades. La compañía que fabrica el motor le da esta curva para cada servo motor que vende.
La curva velocidad-par tiene dos partes principales:
La región continua: Esta es usualmente una forma de caja en la parte inferior de la curva. Si tu punto de trabajo (una cierta velocidad y par) está en esta zona, el servomotor puede funcionar allí durante mucho tiempo. No se sobrecalentará. Esta es el área para operación continua.
La región intermitente: Esta zona se encuentra por encima de la región continua. El servomotor puede funcionar aquí durante cortos periodos de tiempo. Aquí es donde se encuentra el par máximo necesario para la aceleración. Si el motor permanece en esta área por mucho tiempo, se sobrecalentará y podría romperse.
Al seleccionar un servomotor, hay que fijarse en su curva. Debe asegurarse de que su requisito de par continuo se encuentra dentro de la región continua. También debe comprobar que su requisito de par máximo está dentro de la región intermitente de la curva. Si lo que necesita está fuera de la curva, entonces ese servomotor no es adecuado para su aplicación. La curva le da una respuesta clara de sí o no sobre lo que el motor puede hacer.
¿Qué es el par RMS y por qué debe calcularlo para su perfil de movimiento?
Muchos trabajos no funcionan a una sola velocidad y un solo par. Tienen un perfil de movimiento complejo. Un perfil de movimiento cuenta la historia de todos los movimientos que realiza el motor en un ciclo completo. Puede que acelere, luego funcione a una velocidad constante y, a continuación, reduzca la velocidad. El par es diferente a lo largo de este perfil. Entonces, ¿cómo puede saber si el servomotor se calentará demasiado? Tienes que calcular el par RMS.
RMS son las siglas de Root Mean Square (raíz cuadrada media). Suena difícil, pero no es más que un método para hallar el par medio a lo largo de todo el perfil de movimiento. Es un tipo especial de media. Tiene en cuenta el calor producido por la potencia del motor. Piensa en ello como una media ponderada en el tiempo. Da más importancia a las partes de alto par del ciclo. Este número RMS muestra el par constante que crearía la misma cantidad de calor en el servomotor.
Después de calcular el par RMS para tu perfil de movimiento, debes comprobarlo en la curva velocidad-par del motor. El par RMS que has encontrado, a la velocidad media, debe estar dentro de la región continua de la curva. Esta es una comprobación muy importante. Si está fuera de la zona continua, el servomotor se calentará lentamente. Después de algún tiempo, se sobrecalentará. Un buen software de dimensionamiento puede hacer este cálculo RMS por usted. Esto hace que este paso clave sea mucho más sencillo.
¿Cuándo es una buena idea utilizar un engranaje con su servomotor?
A veces, un servomotor por sí solo no es la mejor solución. En muchas soluciones de automatización industrial, utilizamos un reductor de engranajes, también conocido como caja de engranajes. Un engranaje es una herramienta mecánica que intercambia velocidad por más fuerza de giro. Por ejemplo, una relación de engranaje de 10 a 1 reducirá la velocidad de salida 10 veces. Pero hará que el par de salida sea 10 veces mayor (tras una pequeña pérdida de eficiencia).
Hay dos razones principales para utilizar un engranaje:
Para obtener más par: Si tu aplicación necesita un par muy alto pero no necesita una alta velocidad, un engranaje es una opción perfecta. Puedes utilizar un servomotor más pequeño y barato y añadirle un reductor. Esto le dará el alto par que necesita. Esta puede ser una solución mucho mejor que comprar un servomotor de accionamiento directo muy grande y potente. Se trata de un compromiso habitual en el diseño de máquinas.
Para conseguir una mejor relación de inercia: Como ya hemos dicho, una relación de inercia alta no es buena. Un reductor de engranajes es la mejor manera de resolver este problema. Un reductor disminuye la inercia de carga que siente el motor. La reduce por el cuadrado de la relación de transmisión. Así, ¡una relación de engranajes de 10 a 1 hace que la inercia sea 100 veces menor para el servomotor! Esto hace que sea mucho más sencillo para el motor controlar la carga con precisión. Por lo que he visto, el uso de un engranaje es a menudo el secreto de un sistema que funciona sin problemas y con el que se puede contar.
¿Influye el tamaño real del servomotor?
Sí, el tamaño físico del servomotor realmente marca la diferencia. Esta es una cosa del mundo real en la que pensar y que no puede olvidar. Después de haber mirado el par, la velocidad y la inercia, debe comprobar si el servomotor realmente encajará en su máquina. Un motor demasiado grande puede funcionar bien, pero no sirve de nada si no puedes colocarlo donde tiene que ir.
Antes de tomar una decisión definitiva, obtén los planos del servomotor y su engranaje, si piensas utilizar uno. Fíjate bien en las medidas. Compáralas con el espacio del que dispones en el diseño de tu máquina. No olvides dejar espacio para los cables y los enchufes, porque también necesitan espacio. Una buena alineación del eje del motor con la carga también es muy importante para una vida útil larga y sin problemas.
Otra razón por la que el tamaño es importante tiene que ver con el coste y la eficiencia. Un motor más grande no siempre es la mejor opción. Un servomotor sobredimensionado cuesta más dinero. También utiliza más energía para funcionar. También tendrá una mayor inercia del rotor. Esto podría empeorar su relación de inercia si la inercia de su carga es muy pequeña. El objetivo principal es seleccionar un servomotor que tenga el tamaño adecuado, ni demasiado pequeño ni demasiado grande. Así es como se obtiene un diseño que es eficiente y un buen valor por el dinero.
¿Qué otros aspectos importantes influyen en la elección de un servo?
Además de los aspectos principales, como el par, la velocidad y la inercia, hay otros en los que pensar. Estos detalles pueden marcar una gran diferencia en el rendimiento de su aplicación de automatización. Un factor importante es el entorno en el que va a funcionar. Si su máquina va a estar en un lugar muy caliente o muy frío, tiene que elegir un servomotor que esté hecho para soportar esa temperatura. Si el entorno tiene cosas como polvo o agua, es posible que necesite un motor con un sello especial para mantenerlo a salvo.
Otro factor clave es el voltaje que tiene. ¿Cuál es la tensión de entrada en su edificio? Los sistemas de servoaccionamiento se venden con muchas tensiones nominales, como 120 VCA, 240 VCA o 480 VCA. Usted necesita seleccionar un servo drive y un sistema de motor que funcione con el voltaje que usted tiene. También existen sistemas alimentados por CC. Suelen utilizarse en aplicaciones de automatización móviles o alimentadas por batería.
Por último, piense en la herramienta de retroalimentación. La mayoría de las nuevas opciones de servomotores son motores de CA sin escobillas que disponen de codificadores de alta resolución. El codificador indica al servoaccionamiento el punto exacto del eje del motor. Cuanto mejor sea la resolución del codificador, más exacto será el control. Para la mayoría de los trabajos, un codificador normal está bien. Pero para una aplicación que necesita un movimiento muy suave a una velocidad muy baja (baja velocidad), es posible que necesite un codificador especial con una resolución más alta.
¿Cómo puede ayudarle el software a seleccionar el servomotor adecuado?
Hace mucho tiempo, teníamos que hacer todos estos cálculos con papel y bolígrafo. Llevaba mucho tiempo y era fácil equivocarse. Hoy en día, las cosas son mucho más sencillas. La mayoría de las empresas que fabrican servomotores y servodrives regalan software de dimensionamiento. Este software es una herramienta maravillosa. Puede ayudarle a seleccionar el mejor servomotor.
Este software le ayuda durante todo el proceso. Usted introduce toda la información sobre su aplicación. Esto incluye el peso de la carga, los movimientos que debe realizar (el perfil de movimiento), las piezas mecánicas, como tornillos o correas, y la duración del ciclo. A continuación, el software hace todo el trabajo difícil por usted. Calculará la velocidad, el par máximo y el par RMS. También calculará la inercia de la carga.
A continuación, el software busca entre todos los productos que vende la empresa. Le proporcionará una lista de servomotores, servodrives y conjuntos de engranajes adecuados para su aplicación. Le mostrará cuánta potencia adicional tiene cada opción. Esto le ayudará a seleccionar una solución fiable con un buen margen de seguridad. El uso de este software es la mejor manera de estar seguro de que ha hecho el trabajo de seleccionar el servo adecuado correctamente.
Aspectos clave a tener en cuenta
Empiece por su aplicación. Defina claramente lo que necesita que haga el sistema antes de buscar piezas.
Averigüe lo que necesita. Debe averiguar las necesidades de velocidad, par máximo y par continuo (RMS) para su perfil de movimiento exacto.
No olvides la inercia. Una mala relación de inercia suele provocar un mal rendimiento. Intenta conseguir una relación de 10 a 1 o inferior. Utiliza una marcha de ayuda si es necesario.
Utilice la curva velocidad-par. Compruebe siempre que los puntos de trabajo máximos y continuos calculados están dentro de la curva oficial del motor.
Piense en los detalles del mundo real. Asegúrate de que el servomotor encaja físicamente en tu máquina y de que funciona con la tensión de entrada.
Utiliza el software del fabricante. El software de dimensionamiento es una gran herramienta gratuita. Hace el trabajo más rápido, más simple y mucho más correcto. Es la mejor manera de sentirse bien con el servomotor que seleccione.
Comparte tu aprecio
Charlie
Cheney es un ingeniero de aplicaciones sénior de Sino con una gran pasión por la fabricación de precisión. Es Ingeniero Mecánico y posee una amplia experiencia práctica en fabricación. En Sino, Cheney se centra en optimizar los procesos de fabricación de pilas de laminación y en aplicar técnicas innovadoras para conseguir productos de pilas de laminación de alta calidad.
Folleto de nuevos productos
Introduzca su dirección de correo electrónico y le enviaremos el folleto más reciente.
Deje que las pilas de laminación de Sino potencien su proyecto.
Para agilizar su proyecto, puede etiquetar las pilas de laminación con detalles como tolerancia, material, acabado superficial, si se requiere o no aislamiento oxidado, cantidady mucho más.