Laat Sino's lamineren Stacks Empower uw project!
Om je project te versnellen kun je lamineerstapels labelen met details zoals tolerantie, materiaal, oppervlakafwerking, of geoxideerde isolatie al dan niet vereist is, hoeveelheiden meer.
Een servomotor laat dingen heel precies bewegen. Hoe weet een robotarm waar hij moet stoppen? Hoe beweegt een vliegtuig zijn kleppen? Ik heb geleerd dat het antwoord de servomotor is. In dit artikel vertel ik je wat ik heb geleerd over de manier waarop deze geweldige gereedschappen werken. We kijken naar het feedbackmechanisme waardoor ze zo precies bewegen. We bekijken ook hun vele industriële toepassingen.
In principe is een servomotor een speciaal soort motor. Hiermee kun je de exacte plaats van het draaiende deel regelen. Je kunt de hoekige of lineaire positie regelen. Je kunt ook bepalen hoe snel hij beweegt en versnelt, dit zijn zijn snelheid en versnelling. Een gewone gelijkstroommotor draait en draait maar door. Maar een servomotor is anders. Je kunt hem opdragen naar een bepaalde plaats te gaan en die positie vast te houden.
Deze vaardigheid komt van een slimme opstelling die een gesloten-lus controlesysteem wordt genoemd. Het werkt als volgt: Je vertelt de servomotor naar welke positie hij moet bewegen. Hij beweegt daarheen. Vervolgens vertelt een sensor in de motor een controller dat hij op de juiste plaats is. Dit proces van altijd controleren is de reden waarom servo's zo precies kunnen zijn. Als je een robot, CNC-machine of iets anders bouwt dat naar de juiste plek moet bewegen, moet je leren hoe een servomotor werkt.
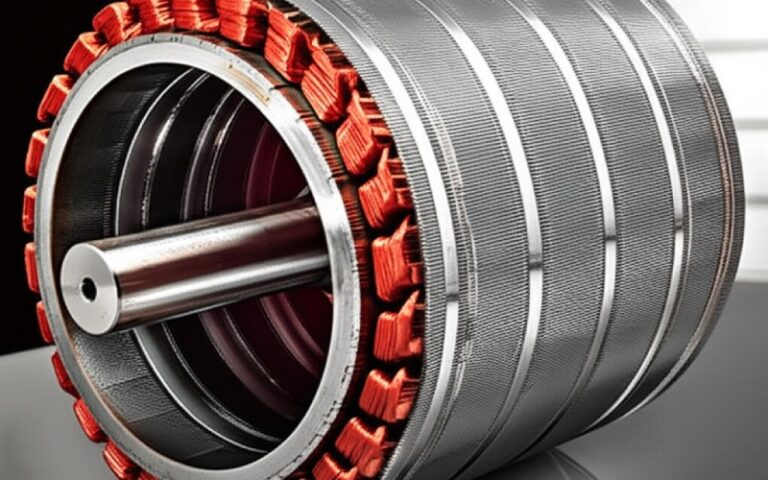
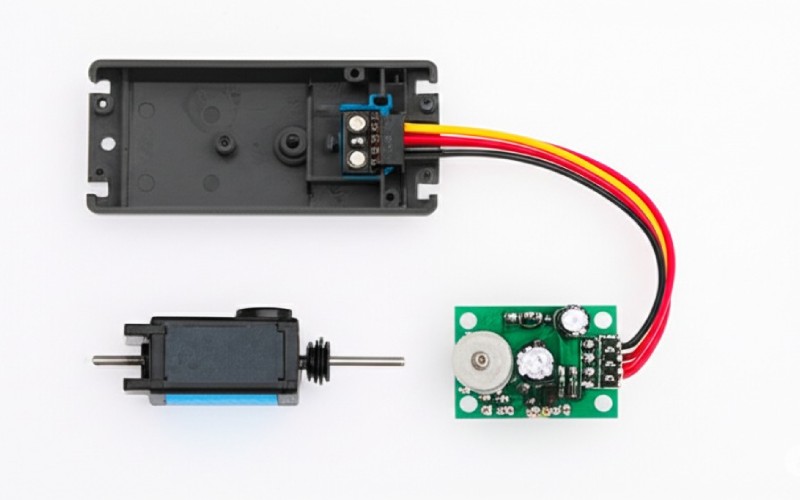
Als je een servomotor opent, zie je een paar hoofdonderdelen die samenwerken. Het is een klein maar slim gereedschap.
De motor geeft de kracht. De tandwielen geven de motor meer draaikracht, wat het koppel van de motor is. De sensor en het besturingscircuit werken als de hersenen. Door deze onderdelen samen te voegen werkt een servomechanisme zo goed voor robotica en automatisering. De motoras is verbonden met de tandwielen. De tandwielen zijn vervolgens verbonden met het draaiende deel dat je aan de buitenkant ziet.
Dit is het meest bijzondere deel van hoe een servomotor werkt. Het idee van een gesloten regelsysteem is wat servo's anders maakt dan andere motoren. Denk aan het parkeren van een auto. Je wilt een voet van de weg af zijn. Je kijkt om te zien hoe ver je bent en bepaalt dan je positie. Je gebruikt je ogen om je werk te controleren en te corrigeren.
Een servomotor doet hetzelfde. De controller stuurt een bericht, of stuursignaal, naar de motor. Dit bericht vertelt de motor om naar een bepaalde plek te bewegen, wat de gewenste positie is. Terwijl de motor draait, leest de sensor (de potentiometer of encoder) altijd de positie van de as af. Deze informatie gaat terug naar de controller. Deze informatie gaat terug naar de controller. De controller kijkt naar de huidige positie en de gewenste positie. Als deze niet hetzelfde zijn, blijft hij stroom naar de motor sturen. Hij stopt wanneer de twee posities gelijk zijn. Dit systeem van altijd controleren en vastzetten is het feedbackmechanisme. Het helpt de servomotor zijn positie zeer nauwkeurig vast te houden.
Ik heb ontdekt dat je niet zomaar een batterij op een servomotor kunt aansluiten. Hij begint niet zomaar te draaien. Een servomotor heeft een speciale set instructies nodig om opdrachten te begrijpen. Deze instructies worden Pulsbreedtemodulatie of PWM genoemd.
Een PWM-signaal is een groep korte stroomstoten. De servomotor verwacht elke 20 milliseconden een van deze uitbarstingen, of een puls. Het gaat om de lengte van de puls, niet om de hoeveelheid elektriciteit. De lengte van deze elektrische puls vertelt de as van de motor waar hij moet draaien.
Door de juiste elektrische puls te sturen, kunnen we de motoras heel nauwkeurig besturen. Veel leuke projecten maken gebruik van controllers zoals een Arduino. Je kunt een servoschild aan deze borden toevoegen. Hierdoor kun je eenvoudig meerdere servomotoren tegelijk aansturen.
Als je op zoek gaat naar een servomotor, zul je zien dat er een paar hoofdsoorten servomotoren zijn. De twee meest voorkomende soorten servomotoren zijn AC-servo's en DC-servo's.
| Deel | AC-servomotor | DC Servomotor |
|---|---|---|
| Stroom | Wisselstroom (AC) | Gelijkstroom (DC) |
| Hoe het werkt | Het gebruikt een wisselstroom om een draaiend magnetisch veld te maken. | Hij maakt gebruik van borstels en een onderdeel dat een commutator wordt genoemd, of hij kan borstelloos zijn. |
| Beste voor | Banen waarbij zeer exacte bewegingen nodig zijn, industriële toepassingen en zware dingen. | Eenvoudigere projecten die minder kosten, zoals hobby robotica en klein gereedschap. |
| Goede dingen | Werkt erg goed, hoeft niet veel gerepareerd te worden, heeft een hoog koppel. | Eenvoudig te bedienen, kost minder geld. |
| Slechte dingen | Het is complexer en kost meer. | Het is niet zo efficiënt. De borstels kunnen oud worden en slijtage veroorzaken. |
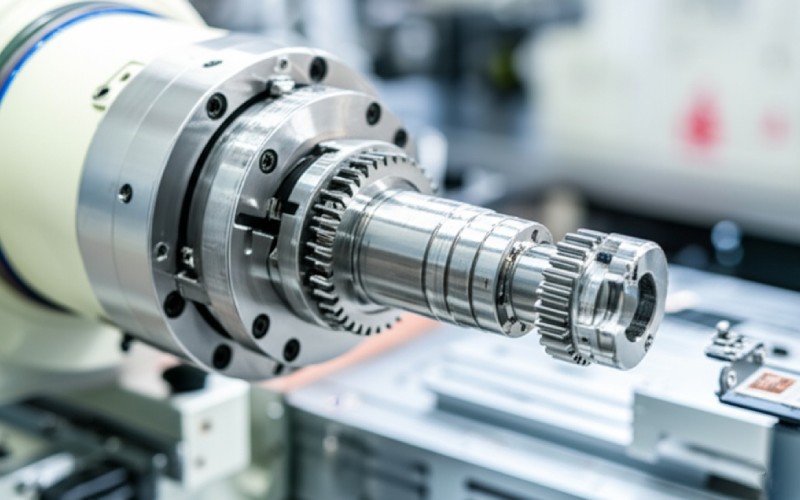
Er zijn ook lineaire servomotoren. Deze bewegen in een rechte lijn in plaats van in een cirkel. Er zijn ook servo's met continue rotatie. Deze kunnen helemaal ronddraaien zoals een normale motor, maar je kunt hun snelheid regelen. Het kiezen van de juiste servomotor is gebaseerd op wat je project nodig heeft. Denk aan het vermogen, hoe precies het moet zijn en je budget. Grote CNC-machines gebruiken bijvoorbeeld vaak servomotoren die sterke AC-servomotoren zijn.
In veel gewone servo's is de positiesensor een potentiometer. Dit geldt vooral voor servo's die in hobbyprojecten worden gebruikt. Een potentiometer is een soort weerstand die kan veranderen. Hij heeft een knop waaraan je kunt draaien. Als je eraan draait, verandert de hoeveelheid elektrische weerstand.
In de motor is de potentiometer gekoppeld aan het laatste tandwiel. Als de motoras draait, draait de potentiometer ook. Het regelcircuit laat een spanning door de potentiometer lopen. Vervolgens leest het de spanning af die eruit komt. De uitgangsspanning verschilt afhankelijk van de positie van de as. Dit vertelt het circuit de exacte plaats van de as op elk moment. Dit is een eenvoudige maar goede manier voor het servosysteem om feedback te krijgen.
Voor het zwaardere werk in de fabriek is een potentiometer misschien niet nauwkeurig genoeg. Voor deze taken gebruikt een servomotor een encoder of resolver als sensor.
Een encoder is een sensor die beweging omzet in een elektrische boodschap. Hij kan de controller meer vertellen dan alleen de positie. Hij kan ook de snelheid en richting van de motoras rapporteren. Er zijn twee hoofdtypen:
Een resolver is een ander soort sensor. Deze is erg sterk en wordt vaak gebruikt op ruwe of vuile plaatsen. Net als een encoder geeft hij feedback over de positie van de as. Beide sensoren zijn veel nauwkeuriger dan een potentiometer. Daarom zie je ze ook in hoogwaardige robotica en automatiseringsmachines.
Nadat je hebt geleerd wat een servomotor is, zul je ze op veel plaatsen tegenkomen. De lijst met toepassingen van servomotoren is erg lang. Dat komt omdat zo veel dingen op een heel precieze manier moeten bewegen.
Hier zijn een paar plaatsen waar servo's worden gebruikt:
Van de eerste keer dat mensen stoom gebruikten om de roeren op schepen te besturen tot de robotica van vandaag, het belangrijkste idee van het servomechanisme is nog steeds een geweldige manier om een machine te besturen.
Toen ik nog leerde, haalde ik vaak servomotoren en stappenmotoren door elkaar. Ze worden allebei gebruikt om de positie te regelen. Maar ze doen hun werk op heel verschillende manieren.
Een stappenmotor beweegt in kleine, vaste stappen. Hij heeft geen terugkoppelingsmechanisme. Je zegt dat hij een aantal stappen moet zetten en hij doet het gewoon. Het is een "open-lus" systeem, wat betekent dat het het volgende doet