Lasciate che le pile di laminazione di Sino diano forza al vostro progetto!
Per velocizzare il progetto, è possibile etichettare le pile di laminazione con dettagli quali tolleranza, materiale, finitura superficiale, se è necessario o meno un isolamento ossidato, quantitàe altro ancora.
Come funziona un servomotore? Una semplice guida per i robot e il lavoro in fabbrica
Un servomotore fa muovere le cose con movimenti molto precisi. Come fa un braccio robotico a sapere il punto giusto in cui fermarsi? Come fa un aereo a muovere i suoi flap? Ho imparato che la risposta è il servomotore. In questo post vi racconterò cosa ho imparato sul funzionamento di questi grandi strumenti. Analizzeremo il meccanismo di feedback che consente loro di muoversi con tanta precisione. Inoltre, esamineremo le loro numerose applicazioni industriali.
Indice dei contenuti
Che cos'è un servomotore e perché è importante?
In pratica, un servomotore è un tipo speciale di motore. Consente di controllare il punto esatto della sua parte rotante. È possibile controllare la sua posizione angolare o lineare. È inoltre possibile controllare la velocità di movimento e l'accelerazione, ovvero la velocità e l'accelerazione. Un normale motore CC si limita a girare e girare. Ma un servomotore è diverso. Gli si può dire di andare in un determinato punto e di mantenere quella posizione.
Questa abilità deriva da una configurazione intelligente chiamata sistema di controllo ad anello chiuso. Funziona così: Si indica al servomotore la posizione in cui muoversi. Il motore si sposta lì. Poi, un sensore all'interno del motore comunica a un controllore che si trova nel posto giusto. Questo processo di controllo continuo è il motivo per cui i servo possono essere così precisi. Se state costruendo un robot, una macchina CNC o qualsiasi altra cosa che debba spostarsi nel punto giusto, dovreste imparare come funziona un servomotore.
Cosa c'è dentro un servomotore?
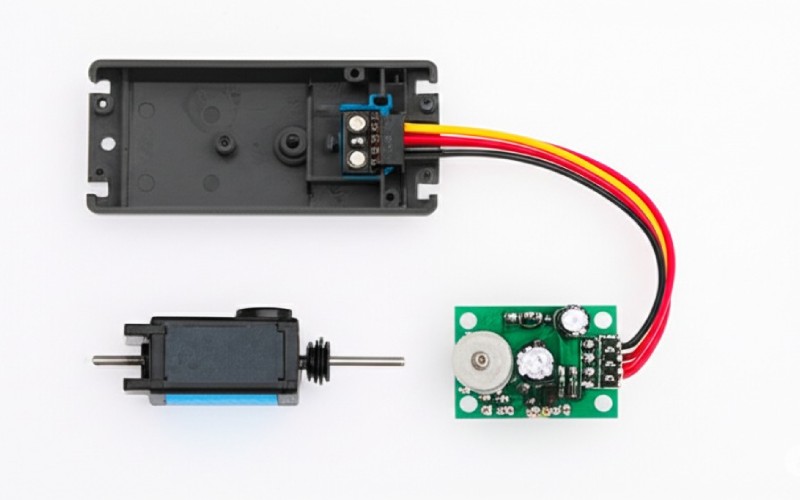
Se si apre un servomotore, si notano alcune parti principali che lavorano in squadra. È uno strumento piccolo ma intelligente.
Un motore normale, come un motore CA o CC.
Alcuni ingranaggi controllano la velocità e la coppia, ovvero la forza di rotazione.
Un sensore che conosce la posizione. Di solito si tratta di un potenziometro o di un encoder.
Un circuito di controllo, ovvero l'elettronica di controllo. Legge il sensore e dice al motore cosa fare.
Il motore fornisce la potenza. Gli ingranaggi danno al motore una maggiore forza di rotazione, che costituisce la coppia del motore. Il sensore e il circuito di controllo agiscono come il cervello. L'unione di queste parti è ciò che rende un servomeccanismo così efficace per la robotica e l'automazione. L'albero del motore si collega agli ingranaggi. Gli ingranaggi si collegano poi alla parte rotante che si vede all'esterno.
Come funziona il meccanismo di feedback ad anello chiuso?
Questa è la parte più speciale del funzionamento di un servomotore. L'idea di un sistema di controllo ad anello chiuso è ciò che rende i servomotori diversi dagli altri motori. Pensate al parcheggio di un'auto. Si vuole essere a un metro dal ciglio della strada. Si guarda per vedere quanto manca e poi si fissa la posizione. Si usano gli occhi per controllare e correggere il lavoro.
Un servomotore fa la stessa cosa. Il controllore invia un messaggio, o segnale di controllo, al motore. Questo messaggio gli dice di spostarsi in un determinato punto, che è la posizione desiderata. Mentre il motore ruota, il sensore (potenziometro o encoder) legge sempre la posizione dell'albero. Queste informazioni vengono trasmesse al controllore. Il controllore esamina la posizione attuale e quella desiderata. Se non coincidono, continua a inviare energia al motore. Si ferma quando le due posizioni sono uguali. Questo sistema di controllo e correzione continua è il meccanismo di retroazione. Aiuta il servomotore a mantenere la posizione con grande precisione.
Come si controlla un servomotore?
Ho scoperto che non basta collegare una batteria a un servomotore. Non inizierà a girare. Un servomotore ha bisogno di una serie speciale di istruzioni per capire gli ordini. Queste istruzioni si chiamano PWM (Pulse Width Modulation).
Un segnale PWM è un gruppo di brevi impulsi di elettricità. Il servomotore si aspetta di ricevere uno di questi impulsi ogni 20 millisecondi. Ciò che conta è la lunghezza dell'impulso, non la quantità di elettricità. La lunghezza dell'impulso elettrico indica all'albero del motore dove girare.
Un impulso della durata di 1 millisecondo indica di solito al servomotore di ruotare completamente su un lato (0 gradi).
Un impulso della durata di 2 millisecondi gli dice di girare completamente dall'altra parte (180°).
Un impulso della durata di 1,5 millisecondi gli dice di spostarsi nel punto centrale (90 gradi).
Inviando il giusto impulso elettrico, possiamo ottenere un controllo molto preciso dell'albero del motore. Molti progetti divertenti utilizzano controllori come Arduino. A queste schede è possibile aggiungere un servo shield. In questo modo è facile controllare più servomotori contemporaneamente.
Quali sono i principali tipi di servomotori?
Quando si cerca un servomotore, ci si accorge che i servomotori sono di diversi tipi. I due tipi più comuni di servomotori sono i servomotori CA e i servomotori CC.
Parte
Servomotore CA
Servomotore DC
Potenza
Corrente alternata (CA)
Corrente continua (DC)
Come funziona
Utilizza una corrente alternata per creare un campo magnetico rotante.
Utilizza spazzole e una parte chiamata commutatore, oppure può essere senza spazzole.
Il migliore per
Lavori che richiedono movimenti molto precisi, applicazioni industriali e oggetti pesanti.
Progetti più semplici che costano meno, come la robotica per hobby e i piccoli utensili.
Cose belle
Funziona molto bene, non ha bisogno di molte riparazioni, ha una coppia elevata.
Facile da controllare, costa meno.
Cose brutte
È più complesso e costa di più.
Non è altrettanto efficiente. Le spazzole possono invecchiare e causare usura.
Esistono anche servomotori lineari. Questi si muovono in linea retta anziché in cerchio. Esistono anche servomotori a rotazione continua. Questi possono ruotare su tutto il perimetro come un normale motore, ma è possibile controllarne la velocità. La scelta del servomotore corretto si basa sulle esigenze del progetto. Pensate alla potenza, alla precisione necessaria e al vostro budget. Ad esempio, le macchine CNC di grandi dimensioni utilizzano spesso servomotori CA di grande potenza.
Che cos'è un potenziometro in un servomotore?
In molti servi normali, il sensore di posizione è un potenziometro. Questo vale soprattutto per i servi utilizzati nei progetti di hobbistica. Un potenziometro è un tipo di resistenza che può cambiare. Ha una manopola che si può girare. Quando la si ruota, la quantità di resistenza elettrica cambia.
All'interno del motore, il potenziometro è collegato all'ultimo ingranaggio. Quando l'albero del motore gira, gira anche il potenziometro. Il circuito di controllo fa passare una tensione attraverso il potenziometro. Poi legge la tensione in uscita. La tensione in uscita varia in base alla posizione dell'albero. Ciò indica al circuito la posizione esatta dell'albero in qualsiasi momento. Si tratta di un modo semplice ma valido per ottenere il feedback del servosistema.
Che cosa sono un codificatore e un risolutore?
Per i lavori di fabbrica più difficili, un potenziometro potrebbe non essere abbastanza preciso. Per questi lavori, un servomotore utilizza un encoder o un resolver come sensore.
Un encoder è un sensore che trasforma il movimento in un messaggio elettrico. Può indicare al controllore molto di più della semplice posizione. Può anche segnalare la velocità e la direzione dell'albero del motore. Ne esistono due tipi principali:
Encoder incrementale: Questo tipo indica al controllore modifiche in posizione. È sempre necessario un punto di partenza da cui lavorare.
Encoder assoluto: Questo tipo fornisce sempre la posizione angolare esatta. Conosce la posizione anche se l'alimentazione viene interrotta e poi riaccesa.
Il resolver è un altro tipo di sensore. È molto robusto e viene spesso utilizzato in luoghi ruvidi o sporchi. Proprio come un encoder, fornisce un feedback sulla posizione dell'albero. Entrambi questi sensori sono molto più precisi di un potenziometro. Per questo motivo sono presenti nelle macchine di robotica e automazione di alto livello.
Dove vengono utilizzati i servomotori?
Dopo aver appreso cos'è un servomotore, inizierete a vederli in molti posti. L'elenco delle applicazioni dei servomotori è molto lungo. Questo perché molte cose devono muoversi in modo preciso.
Ecco alcuni luoghi in cui vengono utilizzati i servi:
Robotica: Ogni giunto di un braccio robotico può essere dotato di un servomotore. Questo gli permette di controllare la sua posizione. Questo vale sia per un grande robot industriale che per un piccolo robot da hobby. Una pinza di un robot utilizza un servomotore per aprirsi e chiudersi con la giusta forza.
Applicazioni industriali: Nelle fabbriche, i servomotori sono utilizzati per azionare nastri in movimento, macchine che riempiono bottiglie e macchine CNC. La loro velocità e precisione rendono possibile l'automazione delle fabbriche.
Veicoli telecomandati: Un aeroplano telecomandato utilizza dei servi per muovere le piccole ali. Un'auto RC utilizza un servo per sterzare. Si tratta di un uso molto comune nelle applicazioni hobbistiche.
Dispositivi medici: I servomotori sono utilizzati in strumenti ospedalieri come scanner e robot per la chirurgia. In questi strumenti, la precisione è molto importante.
Elettronica comune: È possibile trovare un piccolo servomotore anche in oggetti come le macchine fotografiche. Funziona per rendere l'immagine nitida apportando piccole e precise modifiche.
Dal primo utilizzo del vapore per controllare i timoni delle navi alla robotica di oggi, l'idea principale del servomeccanismo è ancora un ottimo modo per controllare una macchina.
Qual è la differenza tra servomotori e motori passo-passo?
Quando ho iniziato a studiare, spesso confondevo i servomotori con i motori passo-passo. Entrambi vengono utilizzati per controllare la posizione. Ma svolgono il loro lavoro in modi molto diversi.
Un motore passo-passo si muove a passi piccoli e fissi. Non dispone di un meccanismo di retroazione. Gli si dice di muoversi di un certo numero di passi e lui lo fa e basta. Si tratta di un sistema "ad anello aperto", il che significa che fa
Condividi il tuo amore
Charlie
Cheney è un ingegnere applicativo senior di Sino, con una forte passione per la produzione di precisione. Ha una formazione in ingegneria meccanica e possiede una vasta esperienza pratica nella produzione. Alla Sino, Cheney si concentra sull'ottimizzazione dei processi di produzione delle pile di laminazione e sull'applicazione di tecniche innovative per ottenere prodotti di alta qualità.
Opuscolo sui nuovi prodotti
Inserite il vostro indirizzo e-mail e vi invieremo l'ultima brochure!
Lasciate che le pile di laminazione di Sino diano forza al vostro progetto!
Per velocizzare il progetto, è possibile etichettare le pile di laminazione con dettagli quali tolleranza, materiale, finitura superficiale, se è necessario o meno un isolamento ossidato, quantitàe altro ancora.