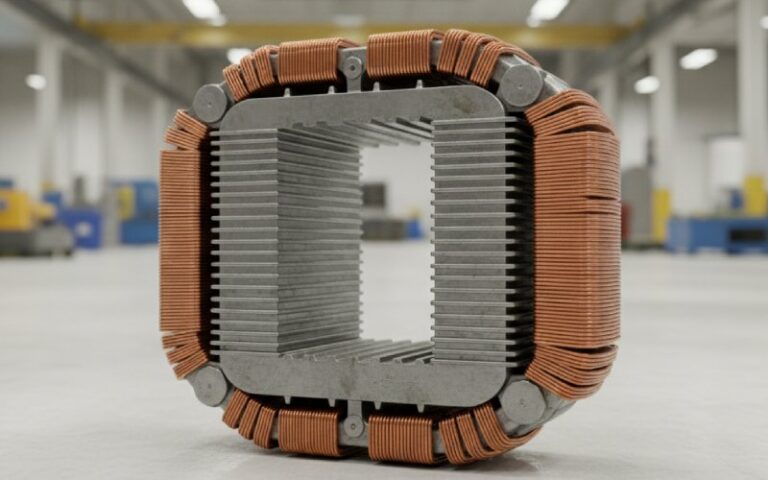
Lasciate che le pile di laminazione di Sino diano forza al vostro progetto!
Per velocizzare il progetto, è possibile etichettare le pile di laminazione con dettagli quali tolleranza, materiale, finitura superficiale, se è necessario o meno un isolamento ossidato, quantitàe altro ancora.
Come scegliere un servomotore: Guida agli aspetti principali da considerare
Scegliere il servomotore sbagliato è un errore facile da commettere. Ma può costare tempo e denaro. Inoltre, può causare molti problemi. Questo articolo è la mia guida per aiutarvi a evitare questi problemi. Vi mostrerò gli aspetti principali a cui dovete pensare. Parleremo di tutto, dalla velocità alla coppia, dall'inerzia al software. Al termine della lettura, saprete come selezionare un servomotore che sia la scelta giusta per il vostro lavoro.
Indice dei contenuti
Che cos'è un servomotore e perché un servoazionamento è importante?
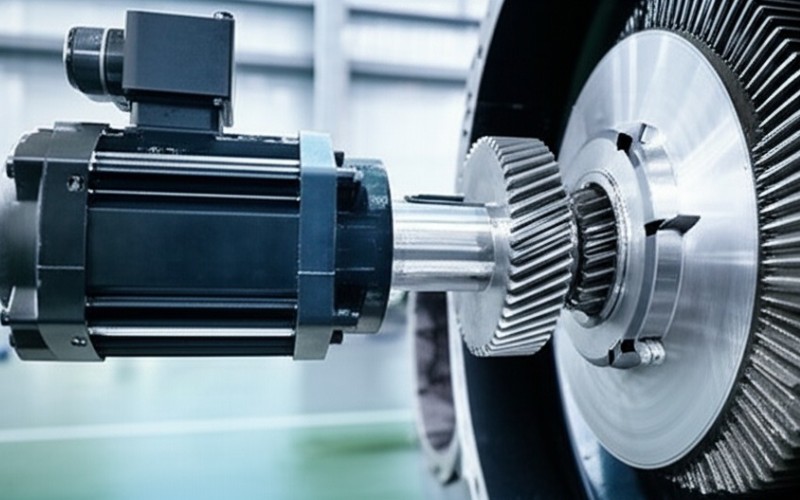
Cominciamo con i fatti semplici. Un servomotore è un tipo speciale di motore elettrico. È fatto per un controllo molto preciso della sua posizione, della sua velocità e della velocità con cui raggiunge la velocità. Immaginate un braccio robotico in una fabbrica. Deve spostarsi sempre nello stesso punto. Questo è il compito di un servomotore. Utilizza uno strumento di feedback, come un encoder. Questo strumento indica a un controllore dove si trova. Questo rende i suoi movimenti molto precisi e affidabili.
Non è possibile avere un servomotore senza un servoazionamento. Il servoazionamento è come il cervello dell'intero sistema. Riceve un comando, come "spostati verso il punto X alla velocità Y". Quindi, invia al servomotore la giusta quantità di tensione e di potenza perché ciò avvenga. Il servoazionamento controlla anche il feedback del motore. In questo modo si assicura che il motore stia facendo ciò che gli è stato detto di fare. Un buon servoazionamento e un buon servomotore che lavorano insieme sono il punto di partenza di qualsiasi sistema di controllo del movimento.
Come iniziare la scelta di un servomotore per il vostro lavoro?
Il primo passo è conoscere la vostra applicazione. Prima ancora di prendere in considerazione un servomotore, è necessario stabilire cosa si vuole fare. Qual è lo scopo della vostra macchina? Cosa state cercando di muovere? Questa è la parte più importante dell'intero processo. Un errore in questo punto causerà problemi in futuro. Per la vostra applicazione esatta, dovete scoprire tutti i dettagli.
Ponetevi queste domande sulla vostra candidatura:
Qual è il carico? Quanto pesa l'oggetto, o il carico utile, che state spostando?
Come si muoverà? Si muoverà in linea o girerà intorno? Si tratta di un semplice movimento avanti e indietro o di un profilo più complesso?
Qual è l'ambiente in cui si trova il servomotore? Il servomotore si troverà in un luogo caldo, freddo, umido o pieno di polvere? L'ambiente è un fattore molto importante.
Qual è la configurazione fisica? Si utilizzano componenti come cinghie, viti o un sistema di trasmissione diretta? Ognuno di questi ha esigenze diverse per l'applicazione.
Descrivendo la vostra applicazione in modo chiaro, avrete un elenco di cose necessarie. Questo elenco è la vostra guida. Vi aiuterà a scegliere il servomotore giusto per la vostra applicazione di automazione. Questa è la base per un progetto che funzioni bene. Se non si ha un'idea chiara dell'applicazione, si fanno solo supposizioni.
Come si può determinare la velocità e la coppia necessarie?
Dopo aver compreso l'applicazione, è necessario calcolare la velocità e la coppia. La coppia è una forza di rotazione. Si può pensare che sia la "forza" che il servomotore deve avere. La velocità è la velocità con cui il motore deve girare per realizzare il movimento nel tempo a disposizione. È necessario calcolare questi numeri per l'applicazione esatta.
È necessario conoscere due tipi di coppia per la vostra applicazione:
Tipo di coppia
Cosa significa
Coppia continua
È la quantità di forza di rotazione che il servomotore può esercitare per tutto il giorno senza doversi fermare o surriscaldare. Questa è anche nota come coppia nominale.
Coppia di picco
Si tratta della forza di rotazione massima che il servomotore può esercitare per un breve periodo di tempo. È necessaria per mettere in movimento il carico (accelerazione) o per fermarlo in fretta.
È necessario determinare i requisiti di coppia per ogni parte del ciclo di movimento. Ciò significa trovare la coppia necessaria per accelerare il carico. Include anche la coppia necessaria per muoversi a velocità costante (per vincere l'attrito). Inoltre, è necessaria la coppia per rallentare il movimento. La quantità massima di coppia necessaria in qualsiasi momento sarà la coppia di picco richiesta. La coppia media sull'intero ciclo aiuta a trovare il requisito di coppia continua. Conoscere i requisiti di velocità e coppia è un passo molto importante per la scelta di un servomotore.
Che cos'è l'inerzia e perché è così importante che l'inerzia corrisponda?
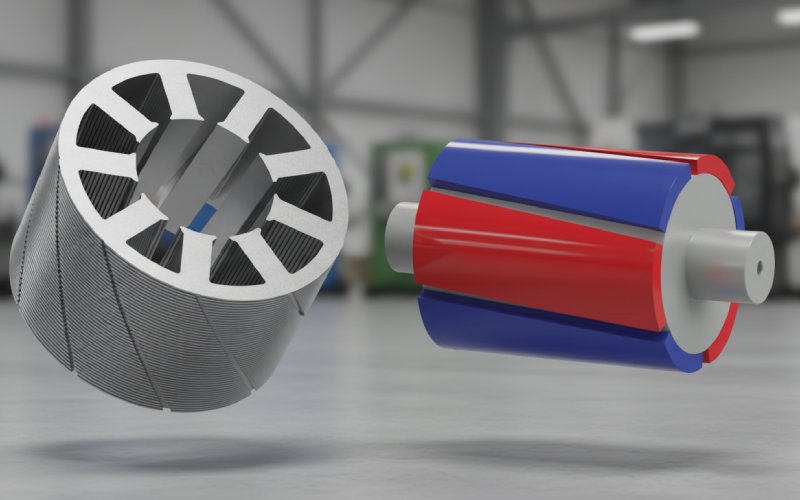
Inerzia è una parola che può sembrare difficile da capire, ma l'idea non lo è affatto. L'inerzia è quanto un oggetto non vuole cambiare la sua velocità. Una palla pesante ha più inerzia di una leggera. È più difficile farla partire e più difficile farla fermare. In un servosistema, ci preoccupiamo dell'inerzia del carico. Ci interessa anche l'inerzia della parte mobile del servomotore, il rotore. Il legame tra questi due elementi è noto come rapporto di inerzia.
Il corretto adattamento dell'inerzia è molto importante per il buon funzionamento del sistema. Il rapporto di inerzia è dato dall'inerzia del carico divisa per l'inerzia del motore. Una buona regola generale è quella di mantenere questo rapporto al di sotto di 10 a 1. Ad esempio, se l'inerzia del motore è pari a 1, l'inerzia del carico deve essere pari a 10 o inferiore. Se il rapporto è troppo alto, il servomotore avrà difficoltà a controllare il carico. È come cercare di controllare un oggetto molto pesante con un muscolo molto piccolo. Il sistema potrebbe oltrepassare il suo obiettivo, scuotersi e avere difficoltà a essere preciso.
Un cattivo rapporto di inerzia è una sfida comune. È possibile calcolare l'inerzia del carico in base alla forma e al peso di ogni parte mobile dell'applicazione. Se il rapporto di inerzia è troppo alto, non preoccupatevi. Esiste un'ottima soluzione. L'uso di un riduttore è un ottimo modo per migliorare l'adattamento dell'inerzia. Questo semplice componente può fare una grande differenza nella capacità del servomotore di gestire il carico.
Come si può leggere una curva velocità-coppia per capire cosa può fare un motore?
Ogni servomotore ha una curva velocità-coppia. Questa curva è uno degli strumenti più importanti da utilizzare. La curva mostra le capacità del servomotore. Indica la forza di rotazione che il motore può esercitare a diverse velocità. L'azienda produttrice del motore fornisce questa curva per ogni servomotore venduto.
La curva velocità-coppia è composta da due parti principali:
La regione continua: Di solito si tratta di una forma a scatola nella parte inferiore della curva. Se il punto di lavoro (una certa velocità e coppia) si trova in quest'area, il servomotore può funzionare per molto tempo. Non si surriscalda. Questa è l'area per il funzionamento continuo.
La regione intermittente: Quest'area si trova sopra la regione continua. Il servomotore può funzionare qui per brevi periodi di tempo. È qui che si trova il picco di coppia necessario per l'accelerazione. Se il motore rimane in quest'area per troppo tempo, si surriscalda e potrebbe rompersi.
Quando si sceglie un servomotore, è necessario esaminare la sua curva. È necessario accertarsi che la coppia continua richiesta rientri nella regione continua. È inoltre necessario verificare che la coppia di picco richiesta rientri nella regione intermittente della curva. Se il fabbisogno è al di fuori della curva, il servomotore non è adatto alla vostra applicazione. La curva fornisce una chiara risposta affermativa o negativa su ciò che il motore può fare.
Che cos'è la coppia RMS e perché dovreste calcolarla per il vostro profilo di movimento?
Molti lavori non funzionano con una sola velocità e una sola coppia. Hanno un profilo di movimento complesso. Un profilo di movimento racconta tutti i movimenti che il motore compie in un ciclo completo. Potrebbe accelerare, poi funzionare a velocità costante e quindi rallentare. La coppia è diversa in tutto il profilo. Come si fa a capire se il servomotore si surriscalda? È necessario calcolare la coppia RMS.
RMS sta per Root Mean Square (quadrato medio). Sembra difficile, ma è solo un metodo per trovare la coppia media sull'intero profilo di movimento. È un tipo speciale di media. Tiene conto del calore prodotto dalla potenza del motore. Si tratta di una media ponderata nel tempo. Dà maggiore importanza alle parti del ciclo con coppia elevata. Questo numero RMS mostra la coppia costante che creerebbe la stessa quantità di calore nel servomotore.
Dopo aver calcolato il numero di coppia RMS per il profilo di movimento, è necessario verificarlo sulla curva velocità-coppia del motore. La coppia RMS trovata, alla velocità media, deve trovarsi all'interno della regione continua della curva. Si tratta di un controllo molto importante. Se si trova al di fuori dell'area continua, il servomotore diventerà lentamente sempre più caldo. Dopo qualche tempo, si surriscalda. Un buon software di dimensionamento può eseguire questo calcolo RMS. Questo semplifica notevolmente questa fase fondamentale.
Quando è opportuno utilizzare un ingranaggio con il servomotore?
A volte, un servomotore da solo non è la soluzione migliore. In molte soluzioni di automazione industriale, utilizziamo un riduttore, noto anche come riduttore. Un ingranaggio è uno strumento meccanico che scambia la velocità con una maggiore forza di rotazione. Ad esempio, un rapporto di trasmissione 10 a 1 riduce la velocità di uscita di 10 volte. Ma la coppia in uscita sarà 10 volte maggiore (dopo una piccola perdita di efficienza).
Ci sono due ragioni principali per utilizzare un ingranaggio:
Per ottenere più coppia: Se l'applicazione necessita di una coppia molto elevata ma non di un'alta velocità, l'ingranaggio è una scelta perfetta. È possibile utilizzare un servomotore più piccolo ed economico e aggiungere un riduttore. In questo modo si otterrà la coppia elevata necessaria. Questa può essere una soluzione migliore rispetto all'acquisto di un servomotore a trasmissione diretta molto grande e potente. Si tratta di un compromesso comune nella progettazione di macchine.
Per ottenere una migliore corrispondenza d'inerzia: come abbiamo detto, un rapporto d'inerzia elevato non è positivo. Un riduttore è il modo migliore per risolvere questo problema. Un riduttore riduce l'inerzia del carico percepita dal motore. La riduce del quadrato del rapporto di trasmissione. Quindi, un rapporto di trasmissione di 10 a 1 riduce di 100 volte l'inerzia del servomotore! Questo rende molto più semplice per il motore controllare il carico con precisione. Da quello che ho visto, l'uso di un ingranaggio è spesso il segreto per un sistema che funziona senza problemi e su cui si può contare.
Le dimensioni effettive del servomotore fanno la differenza?
Sì, le dimensioni fisiche del servomotore fanno davvero la differenza. Si tratta di un aspetto del mondo reale a cui non si può rinunciare. Dopo aver esaminato la coppia, la velocità e l'inerzia, è necessario verificare se il servomotore si adatta davvero alla macchina. Un motore troppo grande può anche funzionare bene, ma non serve a nulla se non si riesce a collocarlo dove deve essere collocato.
Prima di effettuare la scelta definitiva, procuratevi i disegni del servomotore e del relativo ingranaggio, se intendete utilizzarne uno. Osservate attentamente le misure. Confrontatele con lo spazio disponibile nel progetto della macchina. Non dimenticate di lasciare spazio per i cavi e le spine, perché anche loro hanno bisogno di spazio. Anche un buon allineamento dell'albero del motore rispetto al carico è molto importante per una vita lunga e senza problemi.
Un altro motivo per cui le dimensioni sono importanti ha a che fare con il costo e l'efficienza. Un motore più grande non è sempre la scelta migliore. Un servomotore sovradimensionato costa di più. Inoltre, consuma più energia per funzionare. Inoltre, avrà un'inerzia del rotore più elevata. Questo potrebbe peggiorare il rapporto di inerzia se l'inerzia del carico è molto piccola. L'obiettivo principale è quello di scegliere un servomotore della giusta dimensione, non troppo piccolo né troppo grande. In questo modo si ottiene un progetto efficiente e un buon rapporto qualità-prezzo.
Quali altri fattori importanti influiscono sulla scelta di un servo?
Oltre ai fattori principali, come la coppia, la velocità e l'inerzia, ci sono altri elementi a cui pensare. Questi dettagli possono fare una grande differenza nel funzionamento della vostra applicazione di automazione. Un fattore importante è l'ambiente in cui la macchina lavorerà. Se la macchina si trova in un ambiente molto caldo o freddo, è necessario scegliere un servomotore in grado di gestire quella temperatura. Se l'ambiente è caratterizzato da polvere o acqua, potrebbe essere necessario un motore con una guarnizione speciale che lo protegga.
Un altro fattore chiave è la tensione di cui disponete. Qual è la tensione di ingresso del vostro edificio? I servoazionamenti sono venduti con diversi valori di tensione, come 120 VCA, 240 VCA o 480 VCA. È necessario scegliere un sistema di servoazionamenti e motori che funzioni con l'alimentazione di cui si dispone. Esistono anche sistemi alimentati in corrente continua. Questi sono spesso utilizzati in applicazioni di automazione mobili o alimentate a batteria.
Infine, pensate allo strumento di feedback. La maggior parte dei nuovi servomotori sono motori CA senza spazzole dotati di encoder ad alta risoluzione. L'encoder indica al servoazionamento il punto esatto dell'albero del motore. Maggiore è la risoluzione dell'encoder, più preciso sarà il controllo. Per la maggior parte dei lavori, un normale encoder va bene. Ma per un'applicazione che richiede un movimento molto fluido a una velocità molto bassa (bassa velocità), potrebbe essere necessario un encoder speciale con una risoluzione più elevata.
In che modo il software può aiutare a selezionare il servomotore giusto?
Molto tempo fa, dovevamo fare tutti questi calcoli con carta e penna. Si impiegava molto tempo ed era facile sbagliare qualcosa. Oggi le cose sono molto più semplici. La maggior parte delle aziende produttrici di servomotori e servoazionamenti fornisce gratuitamente un software di dimensionamento. Questo software è uno strumento meraviglioso. Può aiutarvi a scegliere il miglior servomotore.
Questo software vi aiuta nell'intero processo. Si inseriscono tutte le informazioni sull'applicazione. Queste includono il peso del carico, i movimenti da eseguire (il profilo di movimento), le parti meccaniche come viti o cinghie e il tempo di ciclo. Il software fa tutto il lavoro difficile per voi. Calcolerà la velocità, la coppia di picco e la coppia RMS. Calcola anche l'inerzia del carico.
Il software esamina quindi tutti i prodotti venduti dall'azienda. Fornirà un elenco di servomotori, servoazionamenti e riduttori adatti alla vostra applicazione. Il software mostra la potenza aggiuntiva di ciascuna scelta. Questo vi aiuterà a selezionare una soluzione affidabile con un buon margine di sicurezza. L'uso di questo software è il modo migliore per essere sicuri di aver scelto correttamente il servo giusto.
Cose fondamentali da tenere a mente
Iniziate dalla vostra applicazione. Prima di esaminare i componenti, è necessario definire con chiarezza le esigenze del sistema.
Determinare il fabbisogno. È necessario individuare la velocità, la coppia di picco e la coppia continua (RMS) necessarie per il profilo di movimento esatto.
Non dimenticate l'inerzia. Un cattivo rapporto di inerzia è spesso causa di cattive prestazioni. Cercate di ottenere un rapporto di 10 a 1 o inferiore. Se necessario, utilizzate una marcia in più.
Utilizzare la curva velocità-coppia. Verificare sempre che i punti di picco e di lavoro continuo calcolati rientrino tranquillamente nella curva ufficiale del motore.
Pensate ai dettagli del mondo reale. Assicuratevi che il servomotore sia fisicamente adatto alla vostra macchina e che funzioni con la vostra tensione di ingresso.
Utilizzate il software del produttore. Il software di dimensionamento è un ottimo strumento gratuito. Rende il lavoro più veloce, più semplice e più corretto. È il modo migliore per essere sicuri del servomotore scelto.
Condividi il tuo amore
Charlie
Cheney è un ingegnere applicativo senior di Sino, con una forte passione per la produzione di precisione. Ha una formazione in ingegneria meccanica e possiede una vasta esperienza pratica nella produzione. Alla Sino, Cheney si concentra sull'ottimizzazione dei processi di produzione delle pile di laminazione e sull'applicazione di tecniche innovative per ottenere prodotti di alta qualità.
Opuscolo sui nuovi prodotti
Inserite il vostro indirizzo e-mail e vi invieremo l'ultima brochure!
Lasciate che le pile di laminazione di Sino diano forza al vostro progetto!
Per velocizzare il progetto, è possibile etichettare le pile di laminazione con dettagli quali tolleranza, materiale, finitura superficiale, se è necessario o meno un isolamento ossidato, quantitàe altro ancora.