Sinoのラミネーションスタックにお任せください!
プロジェクトをスピードアップするために、ラミネーションスタックに以下のような詳細なラベルを付けることができます。 寛容, 材料, 表面仕上げ, 酸化絶縁が必要かどうか, 数量などなど。
三相誘導モーターは、今日の工場では非常に重要なツールです。この強力な誘導モーターは、作業場や農場など多くの場所で見かけることができる。しかし、これらのモーターは通常、一定の速度でしか動きません。ファンを遅くしたり、ベルトコンベヤを速くしたりする必要がある場合はどうすればよいでしょうか?スピードコントロールが便利なのはこのためです。このガイドでは、三相誘導モーターの制御を管理する簡単な方法をいくつかお教えします。これを読めば、機械をよりよく動かす方法がわかります。また、電力を節約し、作業をより円滑に進める方法も学べます。トリッキーなアイデアを簡単なステップで説明します。そうすることで、理解しやすく、実践しやすくなります。
多くの作業では、モーターを常に最高速度で動かす必要はない。例えば、ウォーターポンプについて考えてみよう。時には大量の水を動かす必要があります。また、少ししか動かさないこともあります。インダクションモータが常に最高速度で運転されていると、多くの電力を浪費してしまいます。回転数制御を使えば、モーターの回転数を必要な作業に合わせることができます。これは速度を制御する上で非常に重要です。
三相モーターの速度制御を上手に使えば、良いことがたくさんある。節電に役立ち、経費削減につながる。時間が経っても機械が傷みにくくなる。そのため、機械を長持ちさせることができる。また、作業をよりコントロールしやすくなります。例えば、ベルトコンベヤをゆっくりスタートさせ、荷物が落ちないようにすることができます。優れた速度制御は、優れた誘導モーターをさらに優れたものにします。より役に立ち、無駄な電力も少なくなります。
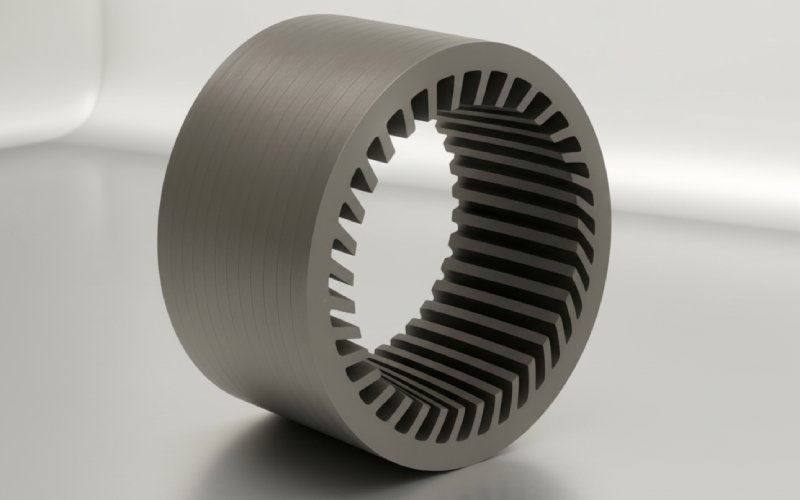
速度制御の話をする前に、3相誘導モーターの仕組みを見てみましょう。モーターには2つの主要部品があります。ステーターとローターです。ステーターは外側にある静止している部分です。その内側には固定子巻線と呼ばれるワイヤーのコイルがある。ローターは回転する内側の部分である。
固定子巻線に三相電圧を供給すると、面白いことが起こる。回転磁界が発生するのだ。ステーター内で磁石が回転しているようなものだと考えればよい。この磁場はローターのバーを通過して移動する。これにより、ローターの内部に電圧と電流が発生(誘導)される。この誘導されたローター電流は、それ自身の磁場を作ります。2つの磁場は互いに押し引きし合う。そしてステーター磁界がローターを引きずり、ローターが回転する。このモーターは、ローターに電線を接触させることなくローターに電圧を発生させるため、誘導モーターと呼ばれる。
固定子内部の回転磁界の速度は同期速度と呼ばれる。これは誘導モーターが到達可能な最も速い速度です。同期速度(Ns)の計算ルールは以下の通りです:
Ns = (120 x f) / P
実際のローター速度は同期速度より常に少し遅い。同期速度とローター速度のわずかな差は、"スリップ "と呼ばれる。このスリップがあるからこそ、誘導モーターは回転力、つまりトルクを生み出し、仕事をすることができるのです。もしスリップがなければ、誘導電動機のトルクはゼロになります。つまり、誘導電動機の速度を変えるには、同期速度を変えるか、スリップを変える必要があります。モータの同期速度は最も重要な部分である。

はい、確かにできます!ステーター側から誘導モーターを制御するのは、ごく普通のことです。つまり、ステーターに入る電力を変更するのです。これが回転数を調整する方法です。電圧や周波数を変えるようなこれらの方法はよく好まれます。なぜなら、誘導モーター自体に変更を加える必要がないからです。
これには主に3つの方法がある:
スピードコントロールの方法にはそれぞれ良い点と悪い点がある。それぞれを見ていこう。そうすることで、誘導電動機に対してどのような効果があるのかが見えてきます。このような固定子回路からの速度制御は、いろいろなところで使われています。
誘導モーターの回転数を制御する一つの方法は、電源電圧を変えることである。トランスのような装置を使って、モーターにかかる電圧も低くすることができる。固定子にかかる電圧が下がると、誘導モーターが発生するトルクは大きく下がる。トルクは電圧にそれ自身を掛けたものに接続される。つまり、わずかな電圧降下が非常に大きなトルク降下につながる。
この速度制御方法は簡単ですが、多くの作業には最適ではありません。トルクが減少すると、誘導モーターは減速します。しかし、スリップが増加するため、より多くのエネルギーがロータ内部の熱として失われます。このため、誘導モーターはより多くの電力を浪費し、熱くなりすぎる可能性があります。この速度制御技術は、ファンやポンプを動かす小型モーターに使われることがある。その場合、回転数が下がると負荷トルクが小さくなる。また、低電圧では力率も悪化する。
同期速度の計算ルールを覚えていますか?それは、速度が極数に依存することを示している。速度制御の極数変更法はこの考えに基づいている。いくつかの特殊な誘導モーターは、固定子巻線を新しい方法で配線できるように作られています。これは異なる極数にするために行われる。例えば、4つの固定子極を持つモーターを8つの固定子極を持つモーターに変更することができる。
極数を変えると、速度が大きく跳ね上がる。60 Hz電源の4極誘導モーターの同期速度は1800 RPMです。これを8極に変えると、同期速度は900 RPMに落ちます。この方法では、異なる速度が得られます。しかし、スムーズな速度制御はできません。設定された速度は2つ、あるいは3つの間から選ぶことができるだけだ。これは、2段変速のファンや特定の工作機械などには便利です。しかし、スピードコントロールの範囲は狭い。段階的な速度変化を得るには、シンプルで効果的な方法だ。
これは、現在使用されている三相誘導モータの最も一般的な速度制御方法です。可変電圧可変周波数(V/VVF)または電圧対周波数(V/f)制御として知られています。考え方は簡単である。電源の周波数を変えれば、誘導電動機の同期速度が変わります。速度が上がれば周波数が上がったからである。速度が低下すれば、周波数が低下したためである。
これがうまく機能するには、周波数と同時に電圧も変えなければならない。誘導電動機のトルクは、固定子の磁界(mmf)に依存しています。この磁界とトルクを同じレベルに保つには、電圧と周波数の比(V/f)を同じにする必要があります。そのためにドライブやインバーターと呼ばれる特別な道具を使います。インバーターは通常の交流電力を直流電力に変えます。その後、変調と呼ばれるプロセスを使用して、直流電力を交流電力に戻します。この新しい交流電力は、任意の電圧と可変周波数にすることができる。これにより、非常に広い範囲の速度で非常にスムーズな速度制御が可能になる。これは、最もエネルギーの無駄が少ない速度制御方法である。
| 特徴 | 電圧制御 | ポール交換 | V/Fコントロール | ローター抵抗制御 |
|---|---|---|---|---|
| モータータイプ | あらゆるリス・ケージ・モーター | 特殊極交換モーター | あらゆるリス・ケージ・モーター | 巻線ロータ誘導モータ |
| 速度範囲 | 小さい | ステップベース(2~3スピード) | 非常に大きい | 大きいが電力を浪費する |
| エネルギー使用 | パワーロスが大きい | 高い | 非常に高い | パワーロスが大きい |
| 滑らかさ | スムーズ | 滑らかではない | 非常にスムーズ | スムーズ |
| 複雑さ | シンプル | シンプルなモーター、シンプルなスイッチ | 複雑なエレクトロニクス(VFD) | シンプル(レオスタット) |
はい、しかしこれは特殊な誘導モーターでしか機能しません。ほとんどの誘導モータはリスケージ型です。これらのモーターでは、ローターのバーが固定されています。これらのモーターでは、ローター側からの速度制御はできません。しかし、巻線ロータまたはスリップリング誘導モータと呼ばれる別の種類のモータもあります。このモーターは、ステーターと同じように、ローターに巻線が巻かれています。
ローターのこれらのコイルは、モーターのシャフトにある3つのスリップリングに取り付けられている。ブラシはこれらのリングに接触します。これにより、ロータ回路に外部抵抗を追加することができます。ロータ回路に変更を加えることで、この誘導モータの速度とトルクの挙動を変えることができます。これにより、全く新しい速度制御技術が得られる。
巻線ロータ誘導モータの場合、ロータ側で速度制御を行う最も単純な方法は、ロータ抵抗を追加することです。ロータのスリップリングにレ オスタット(変更可能な抵抗)を取り付けます。ロータ回路に外部抵抗を追加すると、モータの動作が変わります。抵抗が追加されると、任意のトルクに対してモータのスリップが増加します。
スリップが大きくなると、ローター回転数は下がる。そのため、レオスタットのダイヤルを回すだけで、幅広い速度制御が可能です。この速度制御方法は、非常に高い始動トルクを必要とする仕事に適しています。例えば、クレーン、ホイスト、圧延機などである。悪い点は、電力損失が非常に大きいことです。ローター回路内のすべての余分な抵抗は、電気エネルギーを熱に変えます。ブレーキを踏みながら車を運転しようとするようなものだ。動作はするが、多くのエネルギーを浪費する。始動電流はこの方法でうまく管理できる。
カスケード制御は、ローター側からも機能する、より複雑な速度制御方法である。ローター抵抗制御で起こるような、スリップパワーを熱として無駄にしない賢い方法です。この配置では、互いに接続された2つのモーターを使用します。メインモーターは巻線ローター誘導モーターです。
主モーターのローター回路から来る電力は、レオスタットには送られない。その代わり、その電力は補助モーターと呼ばれる2つ目のモーターを動かすために使われる。この補助モーターがメインシャフトを回転させます。補助モータの設定を変えることで、主モータのスリップ周波数とロータ起電力を制御することができます。これにより速度が変化する。モーターを接続する方法はいくつかあります。これにより、4つの異なる一定速度の選択肢が得られます。このシステムはロータ抵抗制御よりもエネルギーの浪費が少ないが、コストも高く、複雑である。今日では、コンバータとインバータを使用するV/Fドライブの方が、誘導モータの速度には良い選択肢となることが多い。
ここで、三相誘導電動機の速度制御について学んだことを簡単に復習しよう: