Sinoのラミネーションスタックにお任せください!
プロジェクトをスピードアップするために、ラミネーションスタックに以下のような詳細なラベルを付けることができます。 寛容, 材料, 表面仕上げ, 酸化絶縁が必要かどうか, 数量などなど。
サーボモーターは非常に正確な動きで物を動かす。ロボットアームはどうやって止まるべき正しい場所を知るのだろう?飛行機はどうやってフラップを動かすのだろう?私はその答えがサーボモーターであることを知った。この投稿では、この偉大なツールの仕組みについて私が学んだことをお伝えしよう。サーボモーターを正確に動かすためのフィードバック機構について見ていく。また、サーボモーターのさまざまな産業用途についても見ていこう。
基本的に、サーボモーターは特殊なモーターである。サーボモーターは、回転部分を正確に制御することができます。角度位置や直線位置を制御することができます。また、その速度や加速度といった、動く速さやスピードをコントロールすることもできます。通常のDCモーターは、ただ回っているだけです。しかしサーボモーターは違います。サーボモーターは、ある場所に行き、その位置を保持するように指示することができます。
この技術は、クローズドループ制御システムと呼ばれるスマートなセットアップから生まれる。仕組みはこうだ:サーボモーターに移動する位置を指示する。サーボモーターはそこに移動する。そして、モーター内部のセンサーが、正しい位置にあることをコントローラに伝える。この常にチェックするプロセスが、サーボが非常に正確である理由です。ロボットやCNCマシンなど、正しい場所に移動しなければならないものを作るなら、サーボモーターの仕組みを学ぶべきです。
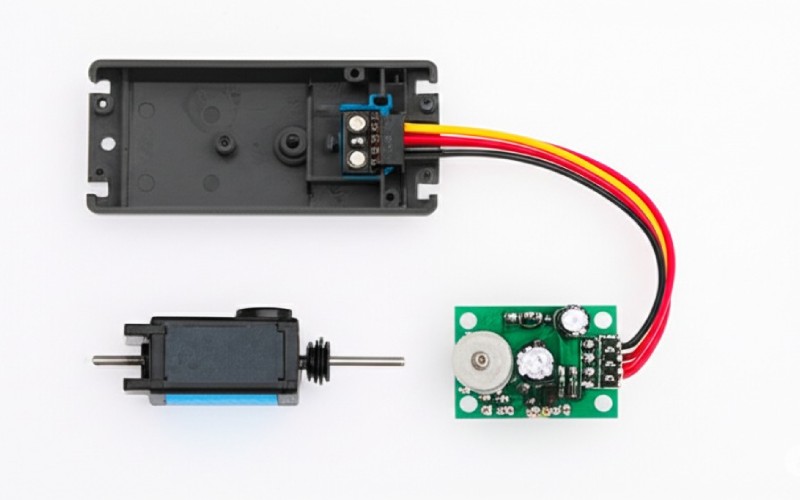
サーボモーターを開けると、チームとして働くいくつかの主要部品が見える。これは小さいが賢い道具である。
モーターは動力を与える。ギアはモーターに回転力を与え、それがモーターのトルクとなる。センサーと制御回路は頭脳のような働きをする。これらのパーツを組み合わせることで、サーボ機構はロボット工学やオートメーションで非常にうまく機能するのだ。モーターシャフトはギアに接続する。そしてギアは、外側に見える回転部分に接続される。
これがサーボモーターの仕組みの中で最も特殊な部分だ。閉ループ制御システムという考え方が、サーボを他のモーターと違うものにしている。車を駐車することを考えてみよう。道路の端から1フィート離れたところに停めたい。どのくらい離れているかを目で確認し、位置を固定する。目で確認し、修正するのだ。
サーボモーターも同じことをする。コントローラーはモーターにメッセージ(制御信号)を送る。このメッセージは、モーターにある特定の場所、つまり目的の位置に移動するよう指示します。モーターが回転すると、センサー(ポテンショメーターまたはエンコーダー)が常にシャフトの位置を読み取ります。この情報はコントローラに送られます。コントローラーは現在の位置と希望の位置を確認します。もし両者が同じでなければ、モーターに電力を送り続けます。2つの位置が同じになると停止する。このように常に確認と修正を繰り返す仕組みがフィードバック機構である。サーボモーターが正確に位置を保持するのに役立っている。
サーボモーターにバッテリーをつなぐだけではだめだということがわかった。ただ回転を始めることはできない。サーボモーターは命令を理解するために特別な命令セットを必要とする。この命令はパルス幅変調(PWM)と呼ばれる。
PWM信号とは、電気の短いバーストの集まりである。サーボモーターは、20ミリ秒ごとにこのバースト、つまりパルスを1回受け取ることを期待している。重要なのはパルスの長さで、電気の量ではない。この電気パルスの長さによって、モーターのシャフトがどこを回転すべきかが決まる。
正しい電気パルスを送ることで、モーターシャフトを非常に正確に制御することができる。多くの楽しいプロジェクトは、Arduinoのようなコントローラーを使っている。これらのボードにサーボシールドを追加することができる。これにより、複数のサーボモーターを一度に簡単に制御できる。
サーボモーターを探すと、大きく分けていくつかの種類があることがわかる。ACサーボとDCサーボだ。
| パート | ACサーボモーター | DCサーボモーター |
|---|---|---|
| パワー | 交流(AC) | 直流(DC) |
| 仕組み | 交流電流を使って回転する磁場を作る。 | ブラシと整流子と呼ばれる部品を使用し、ブラシレスの場合もある。 |
| 最適 | 非常に正確な動きを必要とする仕事、工業用途、重いもの。 | ホビーロボットや小型工具のような、よりコストのかからないシンプルなプロジェクト。 |
| 良いこと | 非常によく働き、修理の必要もあまりなく、トルクも高い。 | コントロールが簡単で、コストもかからない。 |
| 悪いこと | より複雑でコストもかかる。 | 効率が悪い。ブラシが古くなり、磨耗や破損の原因になります。 |
リニアサーボモーターもある。これらは円ではなく直線で動く。連続回転サーボもある。これらは通常のモーターと同じようにずっと回転することができるが、速度をコントロールすることができる。正しいサーボモーターを選ぶには、あなたのプロジェクトが何を必要としているかに基づきます。パワー、正確さ、予算などを考慮してください。例えば、大型のCNCマシンでは、強力なACサーボモーターを使用することが多い。
通常のサーボの多くは、位置センサーがポテンショメーターになっている。特にホビープロジェクトで使われるサーボはそうだ。ポテンショメーターとは、変化する抵抗器の一種。つまみがついていて、それを回すことができる。それを回すと、電気抵抗の大きさが変わる。
モーター内部では、ポテンショメーターが最後のギアと連動している。モーターシャフトが回転すると、ポテンショメーターも回転する。制御回路はポテンショメーターに電圧を通す。そして、出てきた電圧を読み取る。出力電圧はシャフトの位置によって異なる。これにより、回路はいつでもシャフトの正確な位置を知ることができる。これはシンプルだが、サーボシステムがフィードバックを得るための良い方法だ。
工場での過酷な作業では、ポテンショメーターでは十分な精度が得られない場合があります。このような作業では、サーボモーターはエンコーダーやレゾルバをセンサーとして使用します。
エンコーダーは、動きを電気的なメッセージに変えるセンサーです。エンコーダは、位置以上のことをコントローラに伝えることができます。モーターシャフトの速度と方向を報告することもできます。主に2つのタイプがあります:
レゾルバもセンサーの一種です。レゾルバは非常に強力で、粗い場所や汚れた場所でよく使用されます。エンコーダと同様に、シャフトの位置をフィードバックします。これらのセンサーはどちらも、ポテンショメーターよりもはるかに正確です。そのため、高度なロボット工学やオートメーション機械で目にすることができます。
サーボモーターとは何かを知ると、いろいろなところで目にするようになる。サーボモータの用途のリストは非常に長い。なぜなら、非常に多くのものが非常に正確な方法で動く必要があるからです。
サーボが使われる場所をいくつか紹介しよう:
蒸気を使って船の舵を制御するようになった最初の時代から、今日のロボット工学に至るまで、サーボ機構の主要な考え方は、機械を制御する優れた方法であることに変わりはない。
私が習いたての頃、サーボモーターとステッピングモーターをよく混同していた。どちらも位置を制御するために使われる。しかし、その仕事のやり方はまったく異なる。
ステッピングモーターは、小さな固定ステップで動く。フィードバック機構はない。ステップ数を指示すると、それを実行するだけだ。これは「オープンループ」システムであることを意味する。