Sinoのラミネーションスタックにお任せください!
プロジェクトをスピードアップするために、ラミネーションスタックに以下のような詳細なラベルを付けることができます。 寛容, 材料, 表面仕上げ, 酸化絶縁が必要かどうか, 数量などなど。

間違ったサーボモーターを選ぶのは簡単な間違いです。しかし、それは時間とお金を費やすことになります。また、多くの問題を引き起こす可能性もあります。この記事は、あなたがそのような問題から逃れるための私のガイドです。あなたが考えるべき主なことをお見せします。スピード、トルクから慣性、ソフトウェアに至るまで、あらゆることについてお話しします。読み終われば、あなたの仕事に適したサーボモーターの選び方がわかるでしょう。
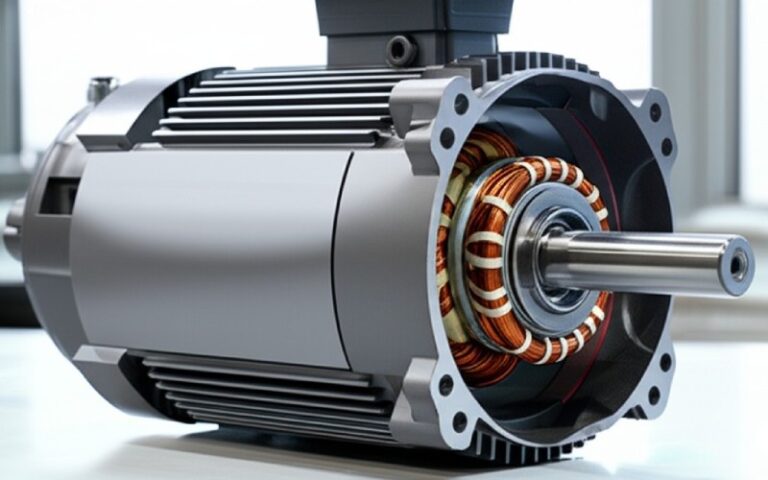
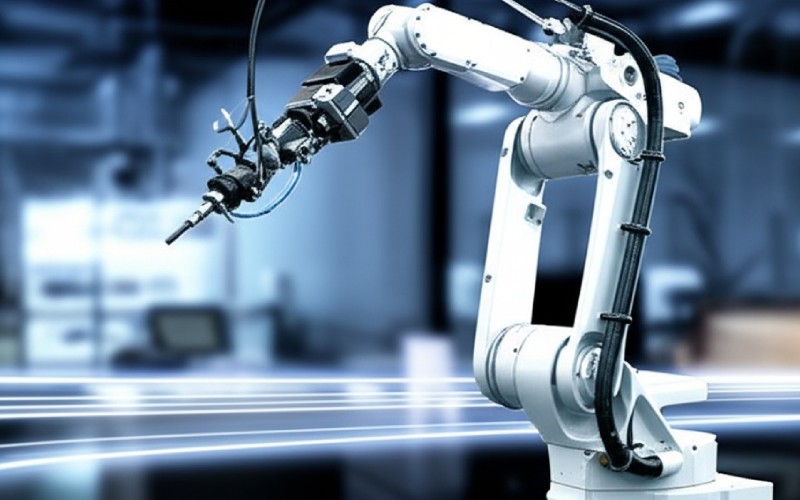
簡単な事実から始めよう。サーボモーターは特殊な電気モーターである。サーボモーターは、モーターを動かす場所、スピード、スピードアップの速さを正確にコントロールするために作られています。工場のロボットアームを思い浮かべてほしい。同じ場所に何度も移動する必要がある。それがサーボモーターの仕事だ。サーボモーターは、エンコーダーのようなフィードバックツールを使う。このツールはコントローラに位置を伝えます。そのため、サーボモーターの動きは非常に正確で、信頼できるものになります。
サーボドライブなしにサーボモーターを使うことはできない。サーボドライブはシステム全体の頭脳のようなものだ。サーボ・ドライブは、システム全体の頭脳のようなものだ。そして、それを実現するために適切な電圧と電力をサーボモーターに送る。サーボドライブはモーターからのフィードバックもチェックする。これにより、モーターが言われたとおりに動いていることを確認する。優れたサーボ・ドライブとサーボ・モーターが一緒に働くことが、優れたモーション・コントロール・システムの出発点なのです。
最初のステップは、アプリケーションのすべてを知ることです。サーボモーターを検討する前に、何をしたいのかを明確にする必要があります。機械の目的は何か?何を動かそうとしているのか?これは全プロセスの中で最も重要な部分です。この時点でミスをすると、後々問題を引き起こすことになります。あなたの正確な用途のために、あなたはすべての詳細を見つける必要があります。
自分のアプリケーションについて、以下の質問を自分に投げかけてみてください:
あなたのアプリケーションを明確に記述することで、必要なもののリストが得られます。このリストはあなたのガイドです。オートメーションアプリケーションに適したサーボモータを選択する際に役立ちます。これが、うまく機能するプロジェクトのベースとなります。アプリケーションの明確なアイデアがなければ、単なる推測に過ぎません。
用途を理解したら、速度とトルクを計算する必要がある。トルクは回転力です。サーボモーターに必要な「強さ」と考えてもいいでしょう。速度は、時間内に動作を実現するためにモーターがどれくらいの速さで回転しなければならないかということです。これらの数値は、正確な用途に合わせて計算する必要があります。
用途に応じた2種類のトルクについて知っておく必要がある:
| トルクタイプ | その意味 |
|---|---|
| 連続トルク | これは、サーボモーターが一日中、停止したり過熱したりすることなく回転できる力の大きさです。定格トルクとも呼ばれます。 |
| ピークトルク | サーボモーターが短時間に出せる最大の回転力です。負荷を動かしたり(加速)、急停止させたりするときに必要です。 |
動作サイクルの各部分に必要なトルクを把握する必要があります。これは、負荷を加速するために必要なトルクを求めることを意味します。また、(摩擦に打ち勝つために)安定した速度で動くために必要なトルクも含まれます。そして、減速するためのトルクも必要です。どの瞬間にも必要なトルクの最高値が、ピークトルク要件となります。全サイクルの平均トルクは、連続必要トルクを求めるのに役立ちます。必要な速度とトルクを知ることは、サーボモータを選択する上で非常に重要なステップです。
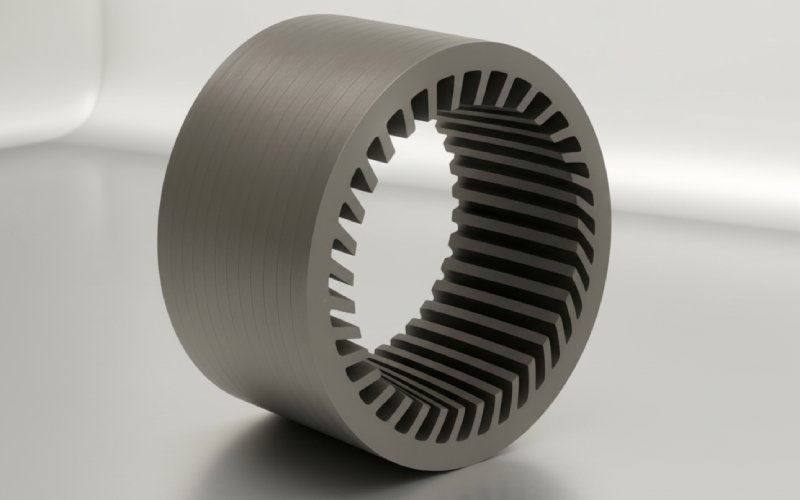
慣性という言葉は難しく聞こえるかもしれないが、考え方はそうではない。慣性とは、物体がどれだけその速度を変えたくないかということである。重いボールは軽いボールよりも慣性がある。スタートさせるのも、ストップさせるのも難しい。サーボシステムでは、負荷の慣性を気にする。また、サーボモーターの可動部であるローターの慣性も気になります。この2つの間の関係は、イナーシャ比として知られている。
システムがうまく機能するためには、正しいイナーシャのマッチングが非常に重要である。イナーシャ比とは、負荷イナーシャをモーターのイナーシャで割ったものです。一般的なルールは、この比率を10対1以下に保つことです。例えば、モータのイナーシャが1の場合、負荷のイナーシャは10以下になるようにします。この比率が高すぎると、サーボモーターは負荷を制御するのが非常に難しくなります。非常に小さな筋肉で非常に重い物体を制御しようとするようなものだ。システムは目標を超えてしまい、揺れ、正確さを保つのが難しくなるかもしれない。
悪いイナーシャ比は一般的な課題です。負荷イナーシャは、アプリケーションのすべての可動部の形状と重量に基づいて計算することができます。イナーシャ比が高すぎる場合でも心配はいりません。素晴らしい解決策があります。減速機を使用することは、イナーシャのマッチングを良くする素晴らしい方法です。この単純な部品は、サーボモーターが負荷を処理するのに非常に大きな違いをもたらします。
すべてのサーボモーターには速度-トルク曲線があります。このグラフは、あなたが使う最も重要なツールの一つです。この曲線は、サーボモーターの能力を示しています。この曲線は、モーターが異なる速度でどれだけの回転力を出せるかを示しています。モーターを製造している会社は、販売するすべてのサーボモーターについてこの曲線を提供しています。
スピード・トルク曲線には2つの主要部分がある:
サーボモーターを選択するときは、その曲線を見なければなりません。必要な連続トルクが連続領域内にあることを確認する必要があります。また、ピークトルクが曲線の断続領域内にあるかどうかも確認する必要があります。必要なものが曲線の外側にある場合、そのサーボモータはアプリケーションに適していません。曲線は、モータができることについて、イエスかノーかの明確な答えを与えてくれます。
多くの仕事は、単一のスピードと単一のトルクで動くだけではない。複雑な動作プロファイルを持っています。モーション・プロファイルは、モーターが1サイクルで行うすべての動作のストーリーを示します。加速し、一定の速度で走り、そして減速する。トルクはこのプロフィールのすべてで異なります。では、サーボモーターが熱くなりすぎるかどうかは、どうやって見分けるのでしょうか?実効トルクを計算する必要があります。
RMSとはRoot Mean Square(二乗平均平方根)の略。難しそうに聞こえますが、モーションプロファイル全体の平均トルクを求める方法にすぎません。特殊な平均です。モータの動力による熱を考慮に入れています。時間加重平均と考えてください。これは、サイクルの高トルク部分をより重視します。この実効値は、サーボモーターに同じ熱量を発生させる一定のトルクを示しています。
モーションプロファイルのRMSトルクを求めたら、それをモータの速度トルク曲線でチェックする必要があります。平均速度で求めた実効トルクは、曲線の連続領域内になければなりません。これは非常に重要なチェックです。連続領域の外側にある場合、サーボモーターは徐々に熱くなっていきます。しばらくするとオーバーヒートしてしまいます。優れたサイジングソフトウェアは、この実効値計算を代行してくれます。これによって、この重要なステップが非常に簡単になります。
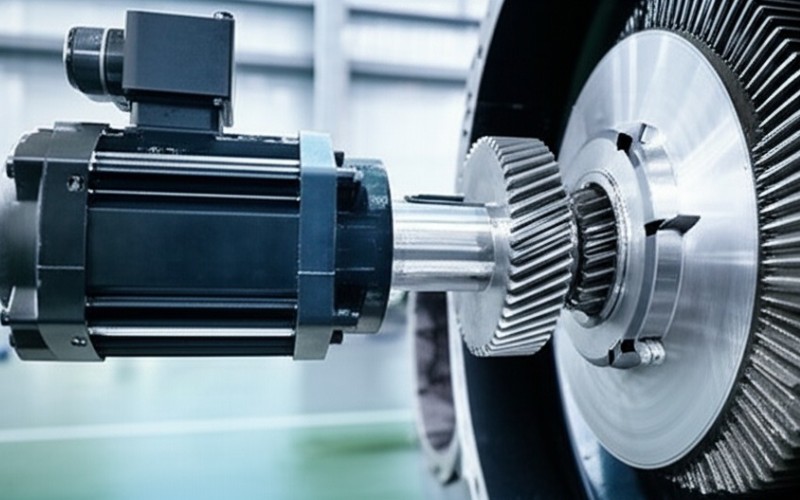
サーボモータ単体では解決できないこともあります。多くの産業用オートメーション・ソリューションでは、ギアボックスとしても知られる減速機を使用します。ギアは、速度をより大きな回転力と交換する機械的な道具です。例えば、10対1のギア比は、出力速度を10倍下げます。しかし、出力トルクは10倍大きくなります(効率は少し落ちますが)。
ギアを使う主な理由は2つある:
そう、サーボモーターの物理的な大きさは、本当に違いがあるのだ。これは忘れてはならない現実的なことです。トルク、回転数、イナーシャを調べたら、そのサーボモーターが本当に機械に入るかどうかをチェックしなければなりません。大きすぎるモーターはうまく動くかもしれませんが、必要なところに置けなければ意味がありません。
最終的な選択をする前に、サーボモーターとそのギアを使用する予定があれば、その図面を入手してください。寸法を注意深く見てください。機械の設計にあるスペースと比較してください。ケーブルやプラグにもスペースが必要なので、余裕を持たせることを忘れないでください。モータのシャフトと負荷のアライメントが適切であることも、長く問題なく使用するために非常に重要です。
サイズが重要なもう一つの理由は、コストと効率に関係している。モーターは大きければ大きいほど良いというわけではありません。特大のサーボモーターは購入コストが高くなります。また、より多くの電力を消費します。また、ローターのイナーシャも大きくなります。負荷イナーシャが非常に小さい場合、イナーシャ比が悪化する可能性があります。主な目標は、小さすぎず、大きすぎないちょうどよいサイズのサーボモーターを選ぶことです。そうすることで、効率的でコストパフォーマンスの高い設計が可能になります。
トルク、スピード、イナーシャといった主要なものの他に、考えなければならない項目があります。これらの詳細は、オートメーション・アプリケーションがうまく機能するかどうかに大きな違いをもたらす可能性があります。重要な要素のひとつは、機械が動作する環境です。機械が非常に高温または低温の場所に置かれる場合は、その温度に対応できるサーボモータを選ぶ必要があります。埃や水などがある環境では、安全性を保つために特殊なシールを備えたモーターが必要になるかもしれません。
もう一つの重要な要素は、あなたが持っている電圧です。あなたの建物の入力電圧は何ボルトですか?サーボドライブシステムは、120 VAC、240 VAC、480 VACなど、多くの定格電圧で販売されています。サーボ・ドライブとモーター・システムは、使用する電力に合わせて選択する必要があります。直流駆動システムもあります。これらは、モバイルまたはバッテリ駆動のオートメーション・アプリケーションでよく使用されます。
最後に、フィードバックツールについて考えてみよう。新しいサーボモータのほとんどは、高分解能エンコーダを搭載したブラシレスACモータです。エンコーダはサーボドライブにモータシャフトの正確な位置を伝えます。エンコーダの分解能が高ければ高いほど、制御はより正確になります。ほとんどの作業では、通常のエンコーダで十分です。しかし、非常に低速(低速度)で非常に滑らかな動きを必要とするアプリケーションでは、分解能の高い特殊なエンコーダが必要になる場合があります。
一昔前までは、紙とペンを使って計算していた。時間がかかるし、間違えやすかった。最近では、物事はずっとシンプルになった。サーボモーターやサーボドライブを製造している会社のほとんどは、サイジングソフトウェアを無料で配布しています。このソフトウェアは素晴らしいツールです。最適なサーボモーターを選ぶのに役立ちます。
このソフトは、すべてのプロセスを手助けしてくれる。アプリケーションに関するすべての情報を入力します。これには、荷物の重量、必要な動き(モーションプロファイル)、スクリューやベルトのような機械部品、サイクル時間などが含まれます。その後、ソフトウェアが難しい作業をすべて行います。速度、ピークトルク、RMSトルクを計算します。また、負荷イナーシャも計算します。
このソフトウェアは、その会社が販売しているすべての製品に目を通します。サーボモーター、サーボドライブ、ギアセットの中から、あなたの用途に合うものをリストアップしてくれます。各選択肢がどれだけの余分なパワーを持っているかが表示されます。これにより、安全性に余裕のある信頼できるソリューションを選択することができます。このソフトウェアを使用することは、正しいサーボを正しく選択するための最良の方法です。