Sinoのラミネーションスタックにお任せください!
プロジェクトをスピードアップするために、ラミネーションスタックに以下のような詳細なラベルを付けることができます。 寛容, 材料, 表面仕上げ, 酸化絶縁が必要かどうか, 数量などなど。

電気機械は、物語の主役であるステーター(固定子)とローター(回転子)に出会うまでは、神秘的に感じられるかもしれない。ステーターがリズムを刻み、ローターがそれに追従する。この2つをダンスのパートナーと考えればいい。この記事では、このダンスがどのようにして主要なモーターファミリーのトルクを生み出すのか、また、ささやくように静かに作動し、何年も長持ちするように、どのように設計し、選択し、冷却し、診断し、手入れをするのかについて、平易な言葉で、しかし技術的に厳密に解説します。
ステーターは、巻線または磁石を運ぶ静止した磁気「ステージ」である。ローターは回転する「ダンサー」で、ステーターの磁場と相互作用してトルクを発生させ、シャフトを通して機械的動力を供給する。ほとんどのACマシンでは、ステーターが回転磁界を形成し、ローターは小さな速度差でそれを追いかけるか(誘導)、またはそれにロックする(同期)。
すべてのモーターは、変化する磁界が電流を誘導し(ファラデー)、磁界中の電流が力を感じる(ローレンツ)という2つの柱を利用している。ステーターの磁場が回転するように巻線を配置し、誘導電流または供給電流がその磁場と相互作用するようにローターに導電路を配置する。界磁と電流の相互作用によって接線方向の力が発生し、エアギャップの周囲で合計されてトルクになる。
三相固定子巻線は回転磁界を形成し、その無負荷機械速度は同期速度Ns = 120-f/P(rpm)である。この1つの関係が、AC機械速度の上限を設定します。
リスケージ誘導モータでは、固定子の回転界磁が回転子バーを通過して電流を誘起し、その電流が自身の界磁を作り、その相互作用によってトルクが発生する。このNsとの差が「スリップ」であり、定格負荷ではほとんどの産業用モーターがおよそ1~5%のスリップで運転される。構造は頑丈で、銅巻線のラミネート鉄ステーターと、ダイキャストまたはバー・アンド・リング導体(アルミニウムまたは銅)のラミネート・ローターで構成されている。
ここで、ローターはそれ自身の安定した磁界(スリップリングを介した直流巻線磁界、または永久磁石)を担います。ステータの波を「追いかける」のではなく、ステータの波にロックするのです。ロータ界磁が一定であるため、モータは界磁電流をトリミングすることで、ユニティまたはリーディング力率で運転することができ、これは大規模な産業プラントで珍重されています。注:同期モータは自己始動ではない。ダンパー巻線またはVFDを使用して、プルイン前に同期速度近くまで加速する。
ロータ(電機子)巻線は、トルクを一方向に保つために電流を機械的に切り替える整流子を介して接続されます。エレガントで高い始動トルク、幅広い速度制御、ブラシの摩耗とメンテナンスのコスト。
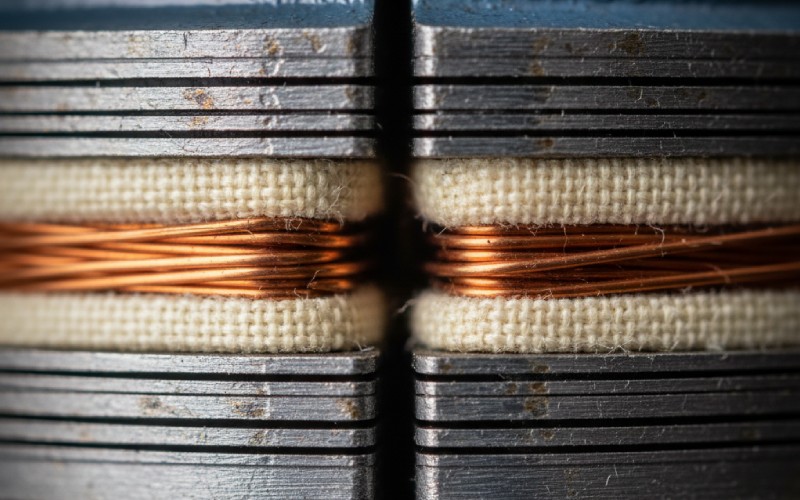
ステーターコアもローターコアも絶縁コアのスタックである。 電気-スチールラミネート.ラミネート加工は、アイアンの渦電流ループを分断し、発熱と損失を劇的に減少させます。一般的な工業用ラミネーションは0.5mm程度で、0.35mmや0.27mmといった薄いグレードでは、高い電気周波数で鉄の損失をさらに減らすことができます。
設計者はケージバーをスロットピッチの数分の一だけ歪ませ、ローターバーが1つのステータースロットと完全に一致することがないようにしています。その結果、コギングが減少し、トルクが滑らかになり、音響ノイズが減少する。これは、電子機器なしでトルクを滑らかにする古典的で低コストの方法です。
ほとんどの汎用産業用モータは全閉ファン冷 却式(TEFC)で、外気は巻線に流れず、シャフトに取り付けたファン がフィン付きフレームに送風して熱を放出します。より過酷な用途には、空気対空気または水対空気の熱交換器と、温度上昇に対応するクラスFまたはHの断熱システムが使用されます。
ケージをアルミから銅ダイキャストにアップグレードすることで、ローターの導電性が向上し、I²R 損失が削減され、効率が上がります。実験室とフィールドでの試験では、設計によりますが、~15~23% のモーター損失の低下と、1.2~1.7 パーセントポイントの効率向上が報告されています。設計によっては、同じ性能でより小さなフレームが可能になります。 6
フリート全体を通して、モーターの故障の約半分はベアリングに起因しており、一般的には潤滑、汚染、ミスアライメント、またはVFDによる迷走シャフト電流が原因です。軽減策は、適切なグリースの使用、シャフトの接地、絶縁ベアリング、およびクリーンなアライメントに及びます。状態監視(振動、温度、モータ電流シグネチャ分析)は問題を早期に発見します。

| マシンタイプ | ステーター・フィールド・ソース | ローターフィールド/電流源 | 行動開始 | スピード対Ns | 典型的な勝利 |
|---|---|---|---|---|---|
| 誘導(リスケージ) | 三相交流巻線→回転フィールド | ローターバー(Al/Cuケージ)に誘導される | セルフ・スタート | Nr < Ns (負荷時標準スリップ1-5%) | 堅牢、低メンテナンス、コスト効率 |
| 同期式(巻線) | 三相交流巻線→回転フィールド | ローターの直流磁界(スリップリング/ブラシレス励磁機) | 始動にはダンパー/VFDが必要 | Nr = Ns | 一定速度、力率制御 |
| PMシンクロナス | 3相交流巻線+ローター上のマグネット | 永久磁石 | 始動/制御用VFD | Nr = Ns | 高効率、高出力密度 |
| ブラッシュドDC | PMまたはDCステーター・フィールド | 整流子を介したアーマチュアコイル | セルフ・スタート | 幅広い電圧設定 | 高い始動トルク、シンプルな制御 |
リニアモーターは、車両上の平らな「ステーター」と軌道上の「ローター」(またはその逆)という形状を「展開」する。同じステーターが波を作り、ローターが波に乗る原理は、車輪の粘着力に頼ることなく、高加速度の輸送を可能にする。
ステーターが動く磁気スクリプトを書き、ローターがそれを読み取ることを学習すれば(誘導または自身のフィールドを運ぶことによって)、あとはエンジニアリングのレバーです:周波数、極、スリップ、材料、冷却、そしてケア。速度式で期待値を設定し、スキューとスロットでリップルを抑え、銅と薄鋼板で効率を追い求め、TEFCと絶縁で温度ラインを維持し、状態監視でベアリングを満足させる。これがステーターとローターの話であり、次の仕様、レトロフィット、または根本的な解決に役立てることができます。