Let Sino's Lamination Stacks Empower Your Project!
To speed up your project, you can label Lamination Stacks with details such as tolerance, material, surface finish, whether or not oxidized insulation is required, quantity, and more.
I have been using motors for many years. In my experience, I found out that not all torque is the same. You might have a motor that looks like it has enough power. But it can shake, make sounds, or not move as smoothly as you want. Two things often cause these issues: cogging torque and torque ripple. I want to share what I have learned about these two problems. In this article, I will talk about what they are. I will also talk about why they happen and what you can do to fix them. This article is for you if you want your motor system to work without any shaking.
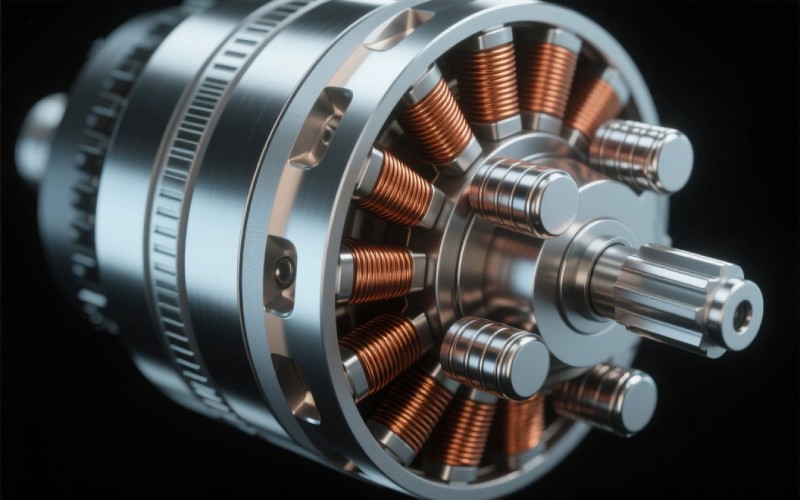
I can recall the first time I held a small brushless DC motor. I turned the shaft with my hand. I felt a weird, bumpy feeling. It felt like the rotor wanted to click into certain spots. That feeling, my friends, is cogging torque. It is a clicking torque that you can feel even when the motor has no power. This effect happens because of the way the permanent magnets on the rotor and the steel parts of the stator work together.
You can think about it this way. The permanent magnets on the rotor are always working. They have a powerful magnetic field. The stator is made from a material that the magnetic field pulls on. The magnets want to take the easiest path. This path leads right to the stator teeth. This pulling force of attraction makes the parts line up in a natural position. When you try to rotate the rotor, you need to use some force to pull the magnets away from the teeth of the stator. This is the cogging torque. This bumpy feeling is a normal part of how many motor designs work. This is why you need some amount of torque just to get the rotor to start moving from a standstill.
Next, let’s talk about torque ripple. It might feel a lot like cogging torque, but it is different. It happens when the motor is turned on and running. Torque ripple is the change in torque that happens as the motor shaft spins around. The motor making an uneven torque production is due to a few things. The main reason is the same magnetic interaction we talked about with cogging torque. The rotor magnets are still pulled toward the stator teeth. This pull creates a ripple torque.
But there is another big reason this happens when we power up the motor. The electric current that goes through the stator winding makes its own magnetic field. A motor makes torque from the way this field and the field from the rotor’s permanent magnets work together. The shapes of the stator parts and the winding are not perfect. Because of this, the way they work together is not perfectly smooth. As the rotor spins, the way the two magnetic fields line up keeps changing. This makes the torque go up and down. This is what creates torque ripple. A good motor control system will try to handle this ripple torque.
This is a very good question. It helps explain what cogging torque really is. As I said before, you can feel cogging torque with no power going to the motor. It is a physical thing that happens because of magnets. The permanent magnets on the rotor are always on. Their magnetic field is always there. The stator core has parts that stick out, called a tooth. These parts give the magnetic flux a path to follow.
The magnetic field always looks for the easiest path. This means lining up the rotor magnets right next to the stator teeth. This creates a very strong pull. It also makes a stable resting position. When you turn the shaft, you are fighting this magnetic force. You have to apply torque to get the magnets to break free from one tooth and move to the next one. This is why it feels “bumpy” or like it’s clicking. This is a natural behavior for any motor that has permanent magnets and a slotted stator. It is a direct result of how the motor is built. Any motor of this type will exhibit cogging torque.
I often see people use the words cogging torque and torque ripple like they mean the same thing. They are connected, but they are not the same. I think putting them in a table helps to see the differences more clearly.
| Feature | Cogging Torque | Torque Ripple |
|---|---|---|
| When It Happens | When the motor is turned OFF. | When the motor is turned ON and is running. |
| Main Reason | The way rotor magnets and stator teeth pull on each other. | A mix of cogging torque and changes in the powered magnetic field. |
| What It Feels Like | A detent or “bumpy” feel when turning the shaft by hand. | Shaking or uneven spinning of the motor when it is on. |
| What Affects It | Motor shape (magnet shape, number of stator tooth parts). | Motor shape, the shape of the current, and the drive control. |
So, you can see cogging torque as one piece of the puzzle. It helps create torque ripple. When the motor is running, you feel the total torque ripple. This is a mix of the cogging torque and the ripples from how we apply current. So, while current is flowing, the torque ripple is what you are trying to control. The cogging torque creates a base level of change that the motor control must then try to smooth out. It is possible for a motor to have low cogging torque. But it can still have a lot of torque ripple if the control system is not set up well.
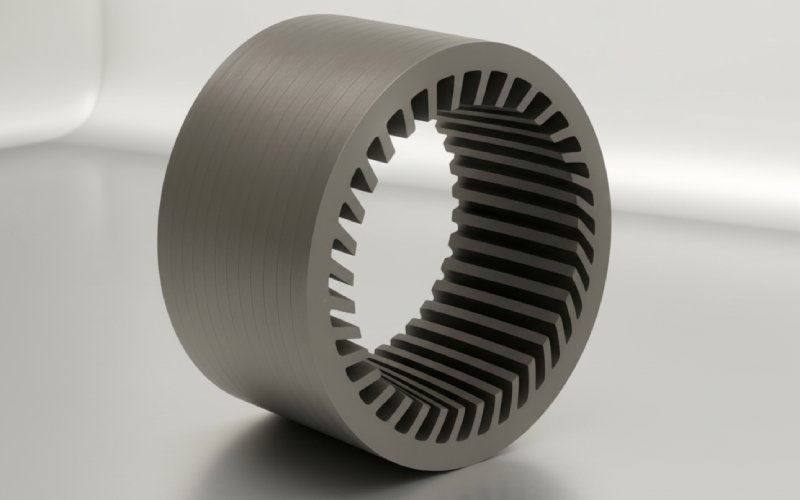
The design of the motor is the most important part in deciding how much cogging torque it has. I have watched engineers work for many hours on this. The amount of cogging torque depends on the number of stator slots and magnetic poles on the rotor. Making changes to these numbers can make a big difference. Another method that is often used is to slant the stator laminations or the rotor magnets. Instead of being straight, the stator slots or magnets are put at a small angle. This makes the change in the magnetic attraction more gradual as the rotor turns. This helps to smooth out the detent effect.
For torque ripple, the motor design is also very important. The shape of the permanent magnets can be made better. The way the winding is placed in the stator slots also makes a big difference. A good winding setup can help make a smoother magnetic field when current is on. The goal for the motor designer is to build a motor that makes a torque that is as constant as possible. This makes the job for the motor control system much simpler. Even the lamination material of the stator can affect the magnetic field and the ripple torque that happens.
Yes, you can. This is where new motor control methods are very helpful. Once you have a physical motor, you cannot change its built-in cogging torque. But you can do many things to lower the total torque ripple. The motor drive is like the electronic brain. It tells the motor what it should do. It controls the current that goes into the stator windings. By carefully shaping this current, the drive can cancel out the torque variations.
Smart control methods can learn the torque ripple pattern of a motor. The control system knows that at a certain rotor position, the motor will have a dip in torque. So, it sends a little bit of extra current at that exact moment to make up for it. Then, when the motor is at a spot where it makes a peak of torque, the control system lowers the current just a little. This needs very exact information on the rotor position and a fast processing loop. A high-tech drive can lower torque ripple a lot, sometimes by more than 90 percent. This is a target for many systems that need to be very exact.
This is a very interesting question. You might think torque ripple is always bad. But its effect really does depend on the speed of the motor. At very low speeds, torque ripple is easy to notice. Think about a robot arm trying to make a very slow, smooth move. Any fluctuation in torque will make it move in a jerky way. In this situation, both cogging torque and ripple torque are big problems. You need a motor and control system made for smooth operation at low speeds.
But at high speeds, the effect of torque ripple can be less of a worry. The tendency of the rotor and its load to keep moving helps to smooth things out. The motor is spinning so fast that the small, quick changes in torque do not have enough time to make a big change in velocity. The system’s own forward motion acts like a filter. Still, even at high speeds, torque ripple can cause unwanted problems like shaking and noise. So, the motion might look smooth. But the torque ripple happening underneath can still be causing stress on the motor and the whole system. The motor speeds at which ripple torque is a problem depend on the specific use.
When I create a new system, I always have to think about the results of torque ripple. The problems can be small things that are annoying. Or they can be big things that cause the whole system to fail. The most common problems are shaking and noise. The constant change in torque can make the whole motor and the parts it’s connected to shake. You can often hear this as a humming or buzzing sound. It gets worse as the motor speed goes up or down.
In systems that need to be more exact, the results are worse.

Permanent magnets are a very important part of this topic, especially for brushless DC motors. These motors are powerful and use less energy because of the strong magnetic field from new types of magnets. But that same strong field is what makes the cogging torque happen. The strength, or flux density, of the magnets has a direct affect on how strong the cogging torque is. A motor that has stronger magnets will usually have a higher amount of cogging torque.
The shape of the permanent magnets and where they are placed on the rotor are also very important parts of the motor design. Designers can shape the magnets to make the magnetic field smoother. This helps to lower both cogging torque and torque ripple. For example, instead of a simple square magnet, they might use a shape that is more rounded. The way the magnets are set up around the rotor can also be used. For instance, a special setup can focus the magnetic field on one side and make it weaker on the other. This is another tool to make the motor work better and reduce unwanted torque variations. The type of motor is important, because not all motors use permanent magnets in the same way.
I have found that fixing these problems needs a way that solves the problem in two steps. You have to make the motor better, and you have to use a smarter control method. You cannot just fix it with computer programs if the motor has very high cogging torque from the start. It is all about a good system design.
First, you must pick the right motor. If your job needs very smooth movement at low speeds, you should find a motor made to have low cogging torque. This could mean a motor that is “coreless” or “slotless.” In these motors, there are no stator teeth for the magnets to pull on. Or, it could be a motor with slanted stator laminations, more poles, or magnets with special shapes. These features help to overcome the physical cause of the problem. A standard motor may cost less, but it might not be the correct one for the job.
Second, you need to apply smart control. A new drive with a fast processor can use special instructions to actively get rid of torque ripple. This usually needs a device for feedback, like an encoder. This part tells the control loop the exact rotor position. With this knowledge, the drive can change the current many hundreds or thousands of times each second. This is done to smooth out the torque. Using a good motor and a smart drive together gives you the best chance to get smooth, continuous, and exact movement.
After many years of working with every type of motor you can think of, here are the most important things I believe you should remember about cogging torque and torque ripple: