Laissez les piles de pelliculage de Sino renforcer votre projet !
Pour accélérer votre projet, vous pouvez étiqueter les piles de laminage avec des détails tels que tolérance, matériel, finition de la surface, la nécessité ou non d'une isolation oxydée, quantitéet bien d'autres choses encore.
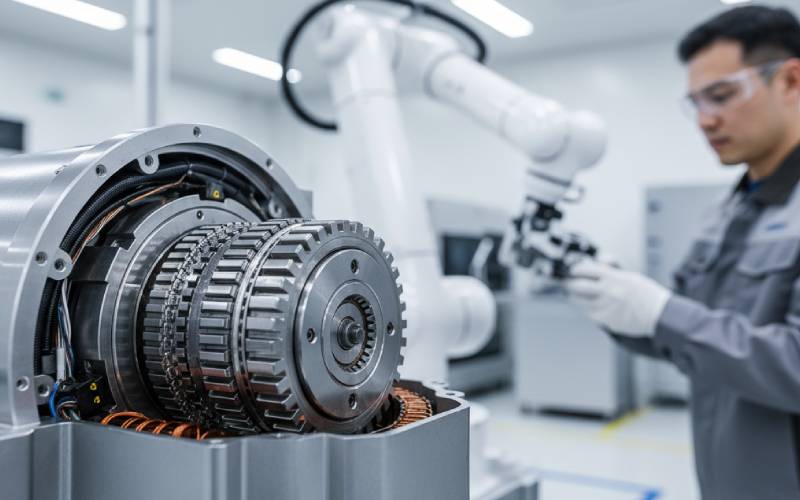
Robotique et Cobots : Piles de lamination de précision pour les servomoteurs
Lorsque vous regardez un bras robotisé placer une puce sur un circuit imprimé ou un cobot remettre délicatement une pièce à un humain, vous observez en réalité un empilement de feuilles d'acier très fines qui font leur travail à la perfection.
Ces feuilles - les pile de laminage à l'intérieur du servomoteur - décidez tranquillement si votre robot se sent soyeux et sûr ou saccadé et bruyantLa plupart des discussions sur la robotique et les cobots ne les mentionnent pas du tout. Pourtant, la plupart des discussions sur la robotique et les cobots les mentionnent à peine.
Cet article traite du traitement des piles de pelliculage en tant que levier de conception de première classe dans le domaine de la robotique et des cobots, et non une marchandise que l'on commande à la fin du projet.
Dans les sections suivantes, vous verrez :
Comment les servomoteurs et les piles de laminage se traduisent directement en termes de précision, de sécurité et de sensation dans les cobots ?
Qui les matériaux, les épaisseurs et les méthodes d'assemblage sont réellement importants (et pourquoi)
Comment les astuces géométriques comme piles obliques et conceptions sans fente dompter le couple et le bruit de cogging
Comment choisir différemment les technologies d'empilage pour robots industriels et cobots
Une pratique liste de contrôle que vous pourrez utiliser la prochaine fois que vous spécifierez une pile de laminage
Table des matières
1. Servomoteurs, robotique et cobots : pourquoi les laminations ont soudain plus d'importance
Les servomoteurs sont les fibres musculaires de la robotique : ils sont compacts, ont un couple élevé et sont constamment contrôlés par des capteurs de retour pour atteindre des positions et des vitesses précises. Ils ferment la boucle avec des encodeurs ou des résolveurs, comparant la position commandée à la position réelle et corrigeant en temps réel. C'est pourquoi ils dominent les robots, les machines à commande numérique et les lignes d'automatisation.
Pour les robots industriels, le cahier des charges est généralement simple : densité de couple, vitesse et temps de fonctionnement élevés. Les cobots, cependant, ajoutent des contraintes supplémentaires : la rétropropulsion, le faible cogging, le faible bruit acoustique et la sécurité inhérente. lorsqu'ils sont heurtés par des êtres humains. Ces caractéristiques "douces" sont profondément influencées par ce qui se passe à l'intérieur du noyau magnétique - la pile de laminage - et pas seulement par votre logiciel de contrôle.
Dans les robots comme dans les cobots, la pile de laminage a une influence :
Densité et efficacité du couple (quantité de couple par kilogramme)
Fluidité à faible vitesse (couple de cogging, ondulation du couple et "sensation")
Comportement thermique et durée de vie (perte de noyau, répartition des points chauds)
Bruit et vibrations (NVH) - particulièrement critiques à proximité des personnes
Caractéristiques de sécurité telles que la rétroconduite et le comportement conforme des cobots
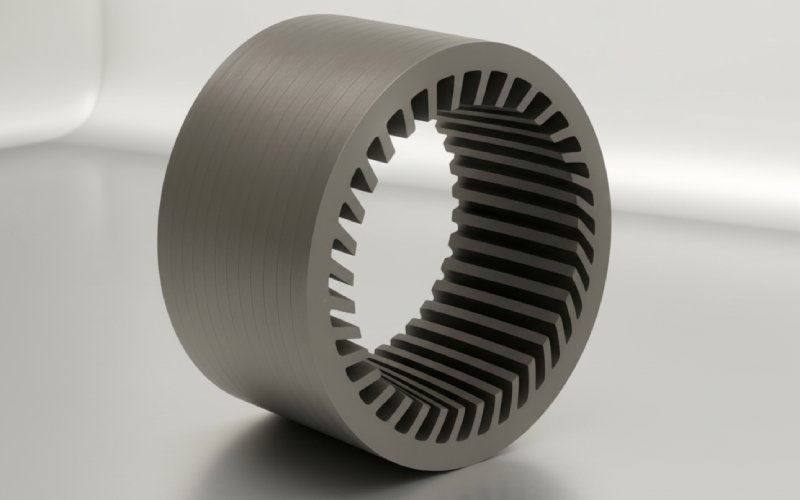
2. A l'intérieur de la pile de laminage : des tôles d'acier minces, de grandes conséquences
La plupart des servomoteurs à haute performance reposent encore sur acier électrique laminationsLes tôles d'acier inoxydable sont composées d'un alliage de fer à faible teneur en carbone et de silicium (~0,5-6,5%), choisi pour sa grande perméabilité et sa faible perte dans le noyau. Ces feuilles sont généralement 0,1-1,0 mm d'épaisseur, poinçonnés ou coupés, puis empilés avec de l'isolant entre eux pour bloquer les courants de Foucault.
Des feuilles plus fines signifient réduction de la perte par courant de Foucault à des fréquences de commutation élevées, ce qui est de plus en plus important à mesure que les servocommandes augmentent les fréquences PWM et que les articulations robotiques augmentent le nombre de pôles et les vitesses. Dans le même temps, l'amincissement augmente les coûts et la complexité de fabrication, ce qui explique pourquoi les fournisseurs de laminage sérieux sont obsédés par les matrices d'emboutissage, les bavures et les revêtements.
Paramètres clés de laminage pour les servomoteurs des robots et des cobots
Levier de conception
Gamme typique / options
Ce que cela apporte à la robotique et aux cobots
Epaisseur de la tôle
0,1-1,0 mm (souvent 0,2-0,35 mm pour les moteurs à haute performance)
Plus fin = perte par courant de Foucault plus faible et fonctionnement plus froid ; plus épais = moins cher et plus rigide
Teneur en silicium de l'acier
~0,5-6,5% Si
Un Si plus élevé réduit la perte de noyau et la coercivité, améliorant ainsi l'efficacité et la marge thermique.
Orientation du grain
Acier électrique non orienté ou à grains orientés
Non orienté pour le flux multidirectionnel dans les machines tournantes ; affecte la performance
Hauteur de la pile
Dépend du couple visé et de la géométrie
Plus de hauteur = plus de couple, mais plus d'inertie, de masse et de charge thermique
Facteur d'empilement
Rapport entre l'acier et la hauteur totale de la pile
Facteur élevé = chemin magnétique plus fort, mais sensible aux bavures et à l'épaisseur du revêtement
Classe de revêtement d'isolation
Divers revêtements / vernis de classe C
Impacts sur la résistance inter-laminaire, les NVH et l'endurance thermique
En tant que concepteur de robots, vous devez considérer la conception de la stratification comme trois cadrans couplés :
Système de matériaux - la qualité de l'acier électrique (ou autre) que vous choisissez
Géométrie - la forme des dents, la combinaison fente/pôle, l'obliquité et la hauteur de la pile
Qualité de l'assemblage - méthode d'assemblage, contrôle des bavures et précision de l'alignement
3. Méthodes d'assemblage : la façon dont la pile est maintenue ensemble modifie ce que le cobot "ressent"
Ces centaines de feuilles minces ne restent pas ensemble comme par magie. Elles sont assemblées à l'aide de méthodes telles que le collage, l'auto-assemblage (Backlack), l'emboîtement mécanique, le rivetage/boulonnage, le clivage et le soudage..
La recherche montre qu'il s'agit d'une lutte incessante : vous avez besoin de résistance mécanique et la fabricabilité, mais vous ne voulez pas ruiner les performances magnétiques en endommageant l'isolation ou en introduisant des contraintes résiduelles et des distorsions. L'assemblage par collage tend à maintenir une faible perte de noyau et une bonne isolation, tandis que le soudage ou les verrouillages mécaniques agressifs peuvent augmenter les pertes et le bruit s'ils ne sont pas soigneusement contrôlés.
Méthodes d'assemblage et impact sur les piles de servo-laminage
Méthode d'assemblage
Impact électromagnétique
Impact mécanique / de fabrication
Quand il brille dans la robotique et les cobots
Auto-collage (Backlack, full-face bonding)
Excellente isolation, faible perte de noyau, faible vibration inter-laminaire
Nécessite un cycle de chauffage contrôlé ; l'uniformité du revêtement est essentielle.
Servomoteurs haut de gamme, cobots à faible bruit, articulations à grande vitesse
Point de colle / collage
Très faible perte additionnelle ; bonne NVH ; préserve les revêtements
Étapes supplémentaires du processus, fours de durcissement, contrôle de qualité minutieux
Axes de précision, outils pour semi-conducteurs, bras collaboratifs silencieux
Verrouillage mécanique (in-die)
Pertes légèrement plus élevées (contraintes locales et dommages au revêtement) ; évolue en fonction du nombre de verrouillages.
Très rentable pour la production de masse ; s'intègre à l'emboutissage
Moteurs de robots industriels à haut volume, articulations sensibles aux coûts
Rivetage / boulonnage
Perturbation locale du flux autour des trous ; gérable pour de nombreuses conceptions
Idéal pour les prototypes ou les laminés découpés au laser ; flexible
Prototypage de nouvelles conceptions d'articulations, robots spéciaux à faible volume
Clampage / pinces externes
Impact limité à l'intérieur de la région active si elle est conçue correctement
Bonne intégrité structurelle pour les grands diamètres ; plus de matériel
Grands moteurs-couple à entraînement direct, grands axes industriels
Soudage laser / TIG
Peut endommager les revêtements et introduire des tensions locales/zones affectées par la chaleur, augmentant les pertes si elles ne sont pas contrôlées.
Rapide et robuste ; automatisation facile ; excellente résistance mécanique
Servos et moteurs de traction à usage intensif où la force domine
Pour les cobots en particulier, piles collées ou auto-collées sont attrayants parce que :
Ils réduisent les pertes par courants de Foucault et donc la chaleur et la dérive.
Ils amortissent les vibrations et les bruits, ce qui est essentiel lorsque le robot travaille à côté d'êtres humains.
Ils maintiennent la constante du couple plus linéaire, ce qui simplifie l'estimation et le contrôle de la force.
4. Géométrie de la pile : lutte contre le cogging, l'ondulation et le bruit
Si l'articulation de votre robot donne l'impression d'être "entaillée" lorsque vous l'enfoncez à la main, c'est qu'il s'agit de couple de cogging - le couple parasite qui provient de l'interaction des aimants permanents avec les dents et les tôles du stator.
Les concepteurs luttent contre ce phénomène en utilisant un mélange de conception électromagnétique et géométrie de la stratificationL'utilisation de l'aimant peut se faire de différentes manières : ajustement des combinaisons fente/pôle, modification de la forme de l'aimant, modification de la géométrie de l'extrémité de la dent et inclinaison de la pile de tôles. A rotor ou stator de travers tord légèrement les tôles le long de l'axe, de sorte que les harmoniques de fente s'équilibrent sur la longueur de l'empilement, ce qui réduit considérablement le couple de cogging et l'ondulation du couple, tout en n'ayant qu'un faible impact sur la constante de couple et le rendement.
Pour la robotique et les cobots, les leviers géométriques au niveau de la stratification sont les suivants :
Piles rotor/stator désaxées - réduire le cogging, l'ondulation du couple et le bruit acoustique, ce qui est particulièrement important pour les mouvements "rampants" à faible vitesse et les cobots travaillant à proximité de personnes
Conception de stator sans fente ou sans dent - l'utilisation d'un noyau laminé en forme d'anneau sans dents pour éliminer presque totalement le cogging, ce qui est utile dans les joints de détection de couple haut de gamme
Combinaisons optimisées de fentes et de pôles - des conceptions de fentes fractionnées pour briser la symétrie et propager les harmoniques
Mise en forme de l'extrémité de la dent et encoche - des ajustements locaux pour réduire la saturation et l'ondulation du couple dans des plages de charge spécifiques
Ouverture et rapports ID/OD - en particulier dans les moteurs sans cadre où les réducteurs ou les capteurs se trouvent à l'intérieur du rotor
5. Robots industriels et cobots : priorités différentes en matière de laminage
Un robot de soudage industriel qui projette des étincelles dans une cellule clôturée présente un profil de risque très différent de celui d'un cobot qui assemble des composants électroniques à côté d'un opérateur humain. Mais dans les deux cas, les empilements de stratification définissent toujours le couple, la douceur et l'enveloppe thermique avec lesquels il est possible de travailler.
Pour robots industrielsLa conception de la stratification tend à donner la priorité à la densité du couple, l'efficacité et le coûtsurtout dans les grands volumes. Un couple de cogging légèrement plus élevé peut souvent être toléré, car une boîte de vitesses, une structure rigide et des boucles de contrôle intelligentes peuvent masquer beaucoup de choses.
Pour cobots et systèmes de type exosqueletteLa motricité arrière et une faible impédance apparente sont essentielles. Les moteurs communs à haute densité de couple sont souvent associés à de faibles rapports de démultiplication ou à des architectures à entraînement quasi-direct ; dans ce régime, le moindre engrenage et la moindre friction sont amplifiés dans ce qu'un être humain ressent physiquement.
Lorsque vous concevez des piles de laminage, traitez les deux classes différemment :
Articulations pour robots industriels
Peut s'accommoder de piles imbriquées ou soudées si cela permet de réduire les coûts et d'augmenter le débit.
Viser une performance de cogging bonne mais pas parfaite ; les entraînements et les boîtes de vitesses aident à masquer les imperfections.
Les limites thermiques sont souvent fixées par le cycle de travail et l'environnement, et non par le confort humain.
Cobots et robots interactifs
Favoriser les empilages collés/autocollés et les stratifications obliques pour un couple ultra doux
Pousser à des laminages plus fins et à de meilleurs revêtements pour réduire les pertes et les dérives de température.
La signature acoustique et la sensation tactile lors de la conduite à contre-courant sont très importantes.
6. Réalités de la fabrication : comment les tolérances se manifestent dans le comportement des robots
Sur le papier, une pile de laminage n'est qu'une pile de formes parfaites. Dans l'usine, des détails tels que la hauteur des bavures, la robustesse du revêtement et l'ajustement de l'arbre confèrent à votre moteur sa véritable personnalité.
Les presses d'emboutissage progressif et d'emboutissage rapide à grande vitesse sont les bêtes de somme de la production de pelliculage, capables de produire des millions de coups par matrice. Lorsqu'elles sont bien utilisées, elles permettent d'obtenir des tolérances serrées et des facteurs d'empilage élevés ; lorsqu'elles sont mal utilisées, elles laissent des bavures qui percent l'isolation, augmentant ainsi les pertes entre les couches et le bruit audible. De nombreux fournisseurs complètent l'estampage par la découpe laser, l'encochage simple et l'encochage rotatif pour les prototypes ou les grands diamètres, puis assembler les piles par emboîtement, collage ou soudage en ligne.
En outre, les inspections - contrôles par MMT, systèmes de vision, testeurs de perte de fer et tests de résistance inter-laminaire Franklin - sont essentielles pour s'assurer que le moteur simulé est bien celui que vous obtiendrez.
Les choix de fabrication qui affectent fortement les performances des robots et des cobots :
Contrôle des bavures - des bavures moins importantes protègent les revêtements et réduisent les pertes de noyau et le bruit
Sélection et application des revêtements - l'isolation robuste et uniforme maintient une faible perte et une inclinaison stable pendant toute la durée de vie du moteur
Stabilité des processus d'empilage et d'assemblage - La pression, la température et l'alignement constants permettent de maintenir la rétrocontrainte et le comportement d'engrenage constants d'un lot à l'autre.
Raccordement de l'arbre à la pile (par exemple, trous de forme précise, ajustements serrés, inserts) - influence le faux-rond, les vibrations et la fiabilité à long terme des joints
7. Au-delà des laminations classiques : Les SMC, le flux axial et les futures articulations de robots
Bien que l'acier électrique empilé soit encore dominant, on observe une tendance croissante à l'utilisation de l'acier inoxydable. les composites magnétiques doux (SMC) et les architectures à flux axial dans les entraînements à haute performance, y compris les véhicules électriques et la robotique. Les SMC utilisent de la poudre de fer isolée pressée en 3D, ce qui permet de concevoir des moteurs avec des trajectoires de flux véritablement tridimensionnelles et un assemblage simplifié par rapport aux tôles traditionnelles.
Pour la robotique et les cobots, cela ouvre des portes à des articulations plus plates, en forme de crêpeLes SMCs peuvent également être utilisés pour des applications telles que la production d'électricité, les circuits de refroidissement intégrés et les topologies qui sont difficiles, voire impossibles, à réaliser avec de simples feuilles empilées. Cependant, les SMC apportent leurs propres compromis en termes de coût des matériaux, de densités de flux réalisables et de maturité des processus, de sorte que de nombreuses conceptions continueront à s'appuyer sur des empilements de laminage soigneusement optimisés dans un avenir proche.
Si vous voulez aller plus loin, envisagez de le faire :
Cœurs hybrides - la combinaison de tôles classiques dans la zone active avec des guides de flux SMC ou usinés lorsque les trajectoires 3D sont utiles
Conception de servomoteurs à flux axial - grâce à des tôles axiales soigneusement découpées ou à des noyaux en SMC, offrant une densité de couple élevée sur une courte longueur axiale.
Revêtements avancés et alliages amorphes - pour réduire davantage les pertes de cœur et maintenir les températures des articulations à un niveau bas dans les bras étroitement emballés
8. Liste de contrôle pratique : conception de votre prochain robot ou cobot pile de laminage
À ce stade, il est facile de se sentir dépassé - il y a beaucoup de boutons à tourner. Pour garder les pieds sur terre, voici une liste de contrôle de la conception au niveau humain que vous pourrez consulter la prochaine fois que vous spécifierez une pile de laminage pour une articulation robotisée.
1. Partez de l'interaction, pas de la fiche technique.
Demandez : Quelle devrait être la sensation de cette articulation lorsqu'un être humain la pousse ? Cela vous indique à quel point vous devez être agressif en ce qui concerne le couple d'engrenage, le bruit et la conduite en marche arrière.
2. Définissez explicitement votre budget de pertes et de températures.
Avec votre fréquence d'entraînement et votre cycle d'utilisation, évaluez grossièrement la perte dans le noyau par rapport à la perte dans le cuivre. Utilisez ces données pour décider de l'épaisseur de la stratification et de la qualité de l'acier.
3. Choisissez une méthode d'assemblage qui corresponde à vos objectifs.
Cobots et axes de précision : privilégiez les piles autocollantes ou collées.
Joints industriels lourds : l'emboîtement ou le soudage peuvent être acceptés s'ils ont été testés.
4. Décidez à l'avance s'il y a lieu d'asymétrie.
L'obliquité nécessite des choix d'outillage et des modifications du processus d'empilage. La décision doit être prise au stade de la spécification du pelliculage, et non après la construction du prototype.
5. Bloquer les tolérances manufacturières, et non les tolérances fantaisistes.
Travaillez avec votre fournisseur de pelliculage pour adapter la capacité des matrices, les limites de bavure et les systèmes de revêtement à votre modèle de performance.
6. Prototype avec le réel processus d'assemblage et d'empilage.
Un prototype découpé au laser et boulonné se comporte différemment d'une pile de production emboîtée ou collée. Validez avec quelque chose de proche du processus final.
7. Mesurer ce que les humains vont ressentir.
Ne vous contentez pas de mesurer l'efficacité ; tracez le couple de rotation, l'ondulation du couple, le couple de contre-entraînement et les spectres acoustiques. C'est ce que les opérateurs et les utilisateurs finaux ressentent réellement.
Si vous traitez la pile de laminage comme un composante stratégique au lieu d'un poste, vos robots et cobots se déplaceront différemment - de manière plus douce, plus silencieuse, plus prévisible et plus sûre.
Et la prochaine fois que quelqu'un s'extasiera sur le caractère "naturel" de l'articulation de votre cobot, vous saurez qu'elle a commencé par une pile de pièces d'acier très fines, assemblées avec beaucoup de soin.
Cheney est un ingénieur d'application principal dévoué à Sino, avec une grande passion pour la fabrication de précision. Il est titulaire d'une formation en ingénierie mécanique et possède une vaste expérience pratique de la fabrication. Chez Sino, Cheney se concentre sur l'optimisation des processus de fabrication des piles de laminage et sur l'application de techniques innovantes pour obtenir des produits de haute qualité.
Brochure sur les nouveaux produits
Veuillez saisir votre adresse électronique ci-dessous et nous vous enverrons la dernière brochure !
Laissez les piles de pelliculage de Sino renforcer votre projet !
Pour accélérer votre projet, vous pouvez étiqueter les piles de laminage avec des détails tels que tolérance, matériel, finition de la surface, la nécessité ou non d'une isolation oxydée, quantitéet bien d'autres choses encore.