Lassen Sie Sino's Lamination Stacks Ihr Projekt verstärken!
Um Ihr Projekt zu beschleunigen, können Sie Lamination Stacks mit Details wie Toleranz, Material, Oberflächengüte, ob eine oxidierte Isolierung erforderlich ist oder nicht, Mengeund mehr.

Drehstrom-Asynchronmotoren verrichten einen Großteil der harten Arbeit in unserer heutigen Welt. Man findet diese starken Induktionsmotoren an vielen Orten. Sie befinden sich in sehr großen Fabrikmaschinen. Sie befinden sich auch in den Pumpen, mit denen Sie Wasser fördern. Dieser Artikel ist ein einfacher Leitfaden, der dir helfen wird, sie zu verstehen. Wir werden in einfachen Schritten erklären, wie ein 3-Phasen-Induktionsmotor aufgebaut ist und wie er funktioniert. Wenn Sie die Lektüre beendet haben, werden Sie wissen, wie dieser großartige Elektromotor funktioniert. Sie werden auch wissen, warum er so häufig verwendet wird.
Ein 3-Phasen-Induktionsmotor ist eine Art von Wechselstrommotor. Bei diesem Motor wird der Rotorteil durch elektromagnetische Induktion mit Strom versorgt. Dies ist derselbe Grundgedanke, den auch ein Transformator verwendet. Aus diesem Grund werden diese Induktionsmotoren manchmal auch als "rotierende Transformatoren" bezeichnet. Es ist wichtig zu wissen, dass es keinen Draht gibt, der direkt mit dem sich bewegenden Teil, dem Rotor, verbunden ist.
Dieser Motortyp ist berühmt, weil er einfach und robust gebaut ist. Er hat keine Teile, die Bürsten genannt werden, wie einige andere Motoren sie haben. Aus diesem Grund braucht er nicht viel Pflege oder viele Reparaturen. Diese Induktionsmotoren starten auch von selbst. Das ist ein großes Plus im Vergleich zu einem Einphasen-Asynchronmotor. Weil sie so einfach sind und man sich auf sie verlassen kann, sind 3-Phasen-Asynchronmotoren der häufigste Typ von Wechselstrommotoren, den man in Fabriken findet. Die Hauptaufgabe dieses Drehstrommotors besteht darin, dreiphasigen Strom in Bewegung umzuwandeln.
Jeder Phaseninduktionsmotor besteht aus zwei Hauptteilen. Wenn man diese Teile versteht, kann man auch verstehen, wie der ganze Motor funktioniert. Der Induktionsmotor besteht aus zwei wichtigen Teilen:
Zwischen dem Stator und dem Rotor befindet sich ein sehr kleiner Raum. Dieser Raum ist der Luftspalt. Der Luftspalt wird so klein wie möglich gemacht, damit der Motor besser funktioniert. Das Zusammenspiel dieser beiden Hauptteile sorgt dafür, dass alle Induktionsmotoren eine Welle drehen und Arbeit verrichten können.
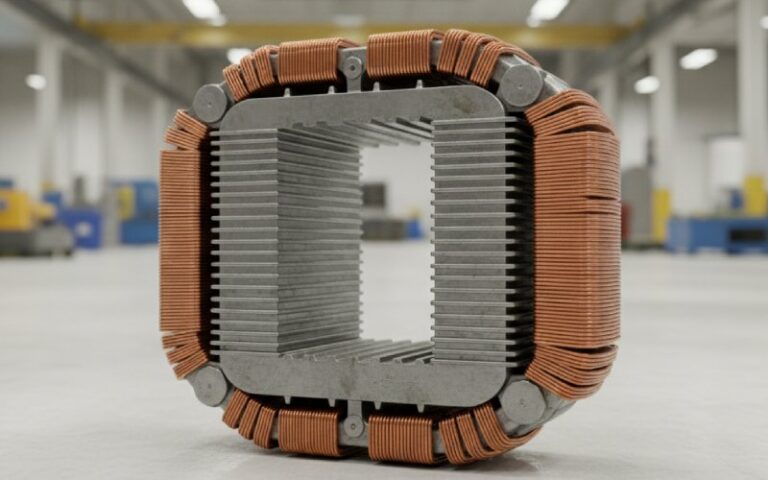
Der Stator von Drehstrom-Asynchronmotoren wird mit großer Sorgfalt gebaut. Er hat die Form eines hohlen Rohrs und wird aus dünnen Blechen aus hochwertigem Stahl hergestellt. Diese dünnen Stahlbleche werden zu einem Stapel zusammengepresst. Die Verwendung dünner Bleche trägt dazu bei, dass weniger Energie verschwendet wird. Im Inneren des Stators befinden sich Einschnitte, die Schlitze genannt werden. In diese Schlitze wird die Statorwicklung eingesetzt. Die Wicklung besteht aus Kupferdraht, der mit einer speziellen Beschichtung versehen ist, damit der Strom nicht entweicht.
Diese Wicklung besteht nicht nur aus einer großen Drahtschleife. Es handelt sich in Wirklichkeit um drei verschiedene Sätze von Wicklungen. Jede Wicklung ist für eine Phase des dreiphasigen Wechselstromnetzes bestimmt. Die Wicklungen werden in einem ganz bestimmten Muster in die Nuten eingesetzt. Sie sind im Abstand von 120 Grad zueinander angeordnet. Wenn man eine dreiphasige Wechselstromquelle an diese dreiphasige Wicklung anschließt, erzeugt sie ein spezielles Magnetfeld. Dieses Feld ist der Schlüssel zur Funktionsweise aller Induktionsmotoren. Der Stator ist für eine bestimmte Anzahl von Polen gewickelt. Mit der Anzahl der Pole wird die Drehzahl des Motors festgelegt. Der Motor besteht aus diesem sehr wichtigen Teil.
Der am häufigsten anzutreffende Rotortyp ist der Eichhörnchenrotor. Seinen Namen hat er wegen seiner Form. Er sieht ein bisschen aus wie ein Laufrad für ein kleines Tier. Diese Der Rotor besteht aus einem Kern aus gestapeltendünne Stahlbleche. Er hat Schlitze auf seiner Außenfläche. Dieser Rotor ist nicht mit einer Drahtwicklung versehen. Stattdessen werden dicke Stangen aus Kupfer oder Aluminium verwendet. Diese Stäbe werden in die Rotorschlitze gesteckt.
Alle Stäbe sind an jedem Ende miteinander verbunden. Sie sind durch dicke Metallringe verbunden, die Endringe genannt werden. So entsteht ein vollständiger elektrischer Pfad. Der Kupferstab und die Endringe sehen wie ein Käfig aus, daher auch der Name Eichhörnchenkäfig. Diese Konstruktion ist sehr robust und nicht kompliziert. Sie hat keine Bürsten oder Schleifringteile, die brechen oder sich abnutzen können. Der Käfigläufer-Induktionsmotor ist sehr robust gebaut. Das macht ihn zu einer Maschine, auf die man sich verlassen kann, und er ist nicht teuer in der Herstellung. Dies ist der Grund dafür, dass mehr als 9 von 10 Induktionsmotoren diese Art von Rotor verwenden. Der Rotor eines Drehstrom-Asynchronmotors ist fast immer ein Käfigläufer.
Ja, es gibt eine andere Art von Rotor. Man nennt ihn einen gewickelten Rotor oder einen Schleifringmotor. Diese Art von Rotor ist nicht mit der Käfigläufer-Version vergleichbar. Ein gewickelter Rotor hat eine vollständige 3-Phasen-Wicklung, ähnlich wie die Wicklung im Stator. Er verwendet keine massiven Stäbe. Die Wicklung besteht aus beschichtetem Kupferdraht und wird in die Nuten des Rotors eingesetzt. Deshalb nennen wir ihn einen phasengewickelten Rotor.
Die Enden dieser Rotorwicklung sind nicht wie bei einem Käfigläufer miteinander verbunden. Stattdessen sind sie mit drei speziellen Metallringen verdrahtet, die sich auf der Welle befinden. Diese werden Schleifringe genannt. Kleine Kohleblöcke, so genannte Bürsten, drücken gegen diese Schleifringe. Auf diese Weise können Sie externe Teile, wie z. B. Widerstände, an den Rotorkreis anschließen. Durch das Hinzufügen von Widerständen erhält man mehr Kontrolle über die Funktionsweise des Motors. So erhält der Motor beispielsweise ein viel stärkeres Anlaufmoment als ein Käfigläufermotor. Ein Schleifringläufermotor wird für Arbeiten verwendet, die viel Kraft zum Starten benötigen. Dieser gewickelte Motor ist schwieriger zu bauen und kostet mehr Geld.
| Merkmal | Käfigläufer | Gewickelter Rotor (Schleifring) |
|---|---|---|
| Wie es gebaut ist | Sehr einfach, mit Stäben und Endringen | Komplexer, mit einer 3-Phasen-Wicklung |
| Startkraft | Gut | Sehr stark, und Sie können es ändern |
| Kosten | Niedrig | Hoch |
| Unterhalt | Sehr wenig, hat keine Bürsten | Benötigt mehr Pflege wegen der Bürsten und Schleifringe |
| Kontrolle | Geschwindigkeitskontrolle ist schwer zu bewerkstelligen | Gute Kontrolle von Geschwindigkeit und Anlaufstrom |
| Verwendet für | Ventilatoren, Pumpen, die meisten Dinge in Fabriken | Kräne, Aufzüge, Fahrstühle, schwere Arbeiten |

Das Funktionsprinzip aller Induktionsmotoren beruht auf einer wissenschaftlichen Regel namens elektromagnetische Induktion. Diese Regel besagt, dass, wenn man einen Draht (einen Leiter) durch ein Magnetfeld bewegt, eine Spannung (EMK) im Draht erzeugt oder induziert wird. Das Gleiche passiert, wenn sich das Magnetfeld bewegt und der Draht stillsteht. Entscheidend ist, dass sich der eine im Vergleich zum anderen bewegt. Dies wird als relative Bewegung bezeichnet.
Bei einem 3-Phasen-Induktionsmotor erzeugt die Statorwicklung ein Magnetfeld, das sich dreht. Dieses sich drehende Feld bewegt sich an den Metallstäben des Rotors vorbei. Die Stäbe des Rotors sind alle miteinander verbunden und bilden so einen vollen Kreis für die Elektrizität. Die induzierte EMK lässt einen Strom durch sie fließen. Dieser Strom fließt in den Rotorstäben. Jetzt haben Sie einen stromdurchflossenen Leiter (den Rotor), der sich in einem Magnetfeld (des Stators) befindet. Dadurch wird eine Drehkraft oder ein Drehmoment auf den Rotor ausgeübt. Dieses Drehmoment ist die Kraft, die den Rotor zum Drehen bringt. Die Kraft wird durch elektromagnetische Induktion vom Stator zum Rotor übertragen.
Ein rotierendes Magnetfeld ist das Geheimnis, warum Drehstrommotoren so gut funktionieren. Wenn Sie eine gute dreiphasige Stromquelle an die Statorwicklung anschließen, passiert etwas Cooles. Jede der drei Wicklungen erzeugt ihr eigenes Magnetfeld. Dieses Feld wird stärker und schwächer, wenn sich die Wechselstromleistung ändert. Da die Wicklungen jedoch im Abstand von 120 Grad zueinander angeordnet sind, addieren sich ihre Magnetfelder zu einem großen Magnetfeld.
Dieses neue, kombinierte Magnetfeld bleibt nicht an einem Ort. Es dreht sich mit gleichmäßiger Geschwindigkeit um den Stator. Wir nennen diese Geschwindigkeit die Synchrondrehzahl. Die Synchrondrehzahl wird durch zwei Faktoren bestimmt: die Frequenz der Wechselstromquelle und die Anzahl der Pole, mit denen der Stator ausgestattet ist. Es ist dieses rotierende Magnetfeld, das sich an den Leitern des Rotors vorbeibewegt und alles in Gang setzt. Ohne dieses Feld könnte der Phaseninduktionsmotor nicht von selbst anlaufen. Das Magnetfeld des Stators muss sich drehen.
Der Rotor eines Induktionsmotors dreht sich immer ein wenig langsamer als das rotierende Magnetfeld des Stators. Der Geschwindigkeitsunterschied zwischen der Synchrondrehzahl des Feldes und der tatsächlichen Drehzahl des Rotors wird als Schlupf bezeichnet. Üblicherweise wird der Schlupf als Prozentsatz angegeben. Könnte sich der Rotor genau mit der gleichen Geschwindigkeit wie das Magnetfeld drehen (mit Synchrongeschwindigkeit), dann würde sich das Feld nicht am Rotor vorbeibewegen.
Wenn es keine Bewegung zwischen ihnen gibt, würde das Magnetfeld die Leiter des Rotors nicht durchschneiden. Das bedeutet, dass keine EMK erzeugt wird und kein Strom im Rotor fließt. Wenn es keinen Strom gibt, gibt es auch kein Drehmoment. Ohne Drehmoment würde der Rotor langsamer werden. Damit der Motor läuft, muss sich der Rotor also langsamer drehen als das Magnetfeld. Nur so kann ein Drehmoment erzeugt werden. Aus diesem Grund wird ein Induktionsmotor manchmal auch als Asynchronmotor bezeichnet (was bedeutet, dass er nicht synchron ist). Der Schlupf wird größer, wenn man den Motor mehr belastet. Ein normaler Induktionsmotor kann einen Schlupf von 3% bis 5% haben, wenn er am härtesten arbeitet.

Die meisten Drehstrom-Asynchronmotoren haben ein Gehäuse mit sechs Anschlusspunkten. Diese Punkte sind die Enden der drei Wicklungen im Inneren des Stators. Es gibt zwei Hauptarten, sie zu verbinden: Stern (auch Wye genannt) und Dreieck. Je nachdem, wie man sie anschließt, ändert sich das Betriebsverhalten des Motors.
Obwohl 3-Phasen-Induktionsmotoren großartige Maschinen sind, sind sie nicht perfekt. Sie haben ein paar Schwachstellen, die Sie kennen sollten. Hier sind die wichtigsten Nachteile von 3-Phasen-Induktionsmotoren.
Trotz dieser Probleme sind Induktionsmotoren aufgrund ihrer Zuverlässigkeit und ihrer geringen Kosten die erste Wahl für viele, viele Aufgaben.