Lassen Sie Sino's Lamination Stacks Ihr Projekt verstärken!
Um Ihr Projekt zu beschleunigen, können Sie Lamination Stacks mit Details wie Toleranz, Material, Oberflächengüte, ob eine oxidierte Isolierung erforderlich ist oder nicht, Mengeund mehr.
Ein Servomotor sorgt dafür, dass sich Dinge mit sehr exakten Bewegungen bewegen. Woher weiß ein Roboterarm, an welcher Stelle er anhalten muss? Wie bewegt ein Flugzeug seine Landeklappen? Ich habe gelernt, dass die Antwort der Servomotor ist. In diesem Beitrag erzähle ich Ihnen, was ich über die Funktionsweise dieser großartigen Werkzeuge gelernt habe. Wir werden uns den Rückkopplungsmechanismus ansehen, der dafür sorgt, dass sie sich so genau bewegen. Wir werden auch einen Blick auf ihre zahlreichen industriellen Anwendungen werfen.
Ein Servomotor ist im Grunde eine besondere Art von Motor. Mit ihm können Sie die genaue Position seines drehenden Teils steuern. Sie können seine Winkel- oder Linearposition steuern. Sie können auch steuern, wie schnell er sich bewegt und beschleunigt, d. h. seine Geschwindigkeit und Beschleunigung. Ein normaler Gleichstrommotor dreht und dreht sich einfach. Aber ein Servomotor ist anders. Ihm kann gesagt werden, dass er eine bestimmte Stelle anfahren und diese Position halten soll.
Diese Fähigkeit beruht auf einem intelligenten System, dem so genannten Closed-Loop-Control-System. Es funktioniert folgendermaßen: Sie sagen dem Servomotor, in welche Position er sich bewegen soll. Er bewegt sich dorthin. Dann meldet ein Sensor im Motor der Steuerung, dass er sich an der richtigen Stelle befindet. Dieser Prozess der ständigen Überprüfung ist der Grund, warum Servos so genau sein können. Wenn Sie einen Roboter, eine CNC-Maschine oder etwas anderes bauen, das sich an die richtige Stelle bewegen muss, sollten Sie lernen, wie ein Servomotor funktioniert.
Wenn Sie einen Servomotor öffnen, sehen Sie einige Hauptteile, die als Team zusammenarbeiten. Es ist ein kleines, aber intelligentes Werkzeug.
Der Motor gibt die Kraft. Die Zahnräder geben dem Motor mehr Drehkraft, das ist das Drehmoment des Motors. Der Sensor und der Steuerkreis wirken wie das Gehirn. Das Zusammenspiel dieser Teile macht einen Servomechanismus für die Robotik und Automatisierung so gut. Die Motorwelle ist mit den Zahnrädern verbunden. Die Zahnräder sind dann mit dem drehenden Teil verbunden, das Sie außen sehen.
Dies ist der besondere Teil der Funktionsweise eines Servomotors. Die Idee eines geschlossenen Regelkreises ist es, was Servos von anderen Motoren unterscheidet. Denken Sie an das Einparken eines Autos. Sie wollen einen Fuß vom Straßenrand entfernt sein. Sie würden nachsehen, wie weit Sie sind, und dann Ihre Position fixieren. Sie benutzen Ihre Augen, um Ihre Arbeit zu überprüfen und zu korrigieren.
Ein Servomotor macht das Gleiche. Die Steuerung sendet eine Nachricht, ein Steuersignal, an den Motor. Diese Nachricht weist ihn an, sich zu einem bestimmten Punkt zu bewegen, der die gewünschte Position ist. Während sich der Motor dreht, misst der Sensor (das Potentiometer oder der Encoder) ständig die Position der Welle. Diese Information wird an die Steuerung zurückgegeben. Die Steuerung prüft die aktuelle Position und die gewünschte Position. Wenn sie nicht übereinstimmen, wird der Motor weiter mit Strom versorgt. Er hält an, wenn die beiden Positionen übereinstimmen. Dieses System der ständigen Überprüfung und Korrektur ist der Rückkopplungsmechanismus. Er hilft dem Servomotor, seine Position mit großer Genauigkeit zu halten.
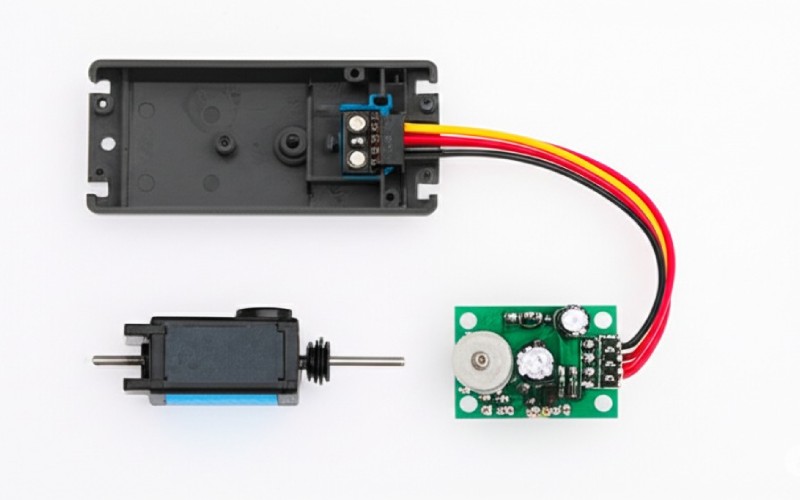
Ich habe herausgefunden, dass man nicht einfach einen Akku an einen Servomotor anschließen kann. Er wird nicht einfach anfangen, sich zu drehen. Ein Servomotor braucht einen speziellen Satz von Anweisungen, um Befehle zu verstehen. Diese Anweisungen werden Pulsweitenmodulation (PWM) genannt.
Ein PWM-Signal ist eine Gruppe von kurzen Stromstößen. Der Servomotor erwartet alle 20 Millisekunden einen dieser Stromstöße oder einen Impuls. Die Länge des Impulses ist entscheidend, nicht die Menge des Stroms. Die Länge dieses elektrischen Impulses gibt der Motorwelle vor, wo sie sich drehen soll.
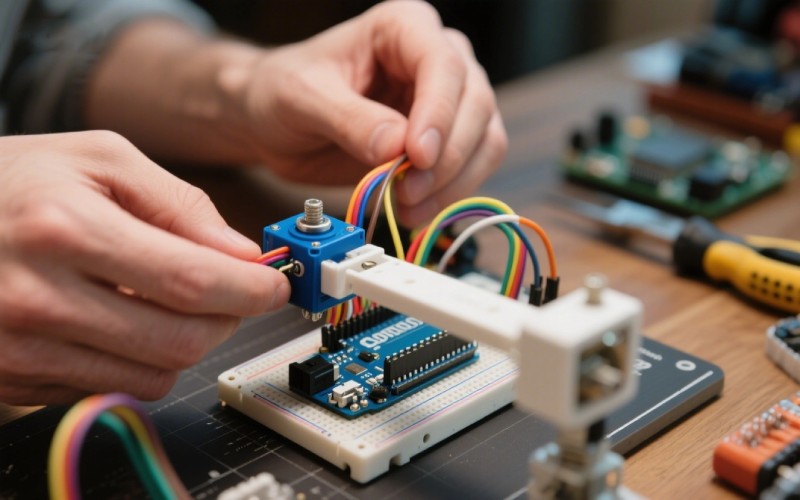
Wenn wir den richtigen elektrischen Impuls senden, können wir die Motorwelle sehr präzise steuern. Viele lustige Projekte verwenden Controller wie einen Arduino. Sie können diese Boards mit einem Servoschild ergänzen. Damit lassen sich mehrere Servomotoren auf einmal steuern.
Wenn Sie sich nach einem Servomotor umsehen, werden Sie feststellen, dass es einige Hauptarten von Servomotoren gibt. Die beiden häufigsten Arten von Servomotoren sind AC-Servos und DC-Servos.
| Teil | AC-Servomotor | DC-Servomotor |
|---|---|---|
| Strom | Wechselstrom (AC) | Gleichstrom (DC) |
| Wie es funktioniert | Sie verwendet einen Wechselstrom, um ein rotierendes Magnetfeld zu erzeugen. | Er verwendet Bürsten und ein Teil, das Kommutator genannt wird, oder er kann bürstenlos sein. |
| Am besten für | Arbeiten, die sehr genaue Bewegungen erfordern, industrielle Anwendungen und schwere Gegenstände. | Einfachere Projekte, die weniger kosten, wie Hobby-Robotik und kleine Werkzeuge. |
| Gute Dinge | Funktioniert sehr gut, braucht nicht viel Reparatur, hat ein hohes Drehmoment. | Einfach zu kontrollieren, kostet weniger Geld. |
| Schlechte Dinge | Sie ist komplexer und kostet mehr. | Sie ist nicht so effizient. Die Bürsten können alt werden und sich abnutzen. |
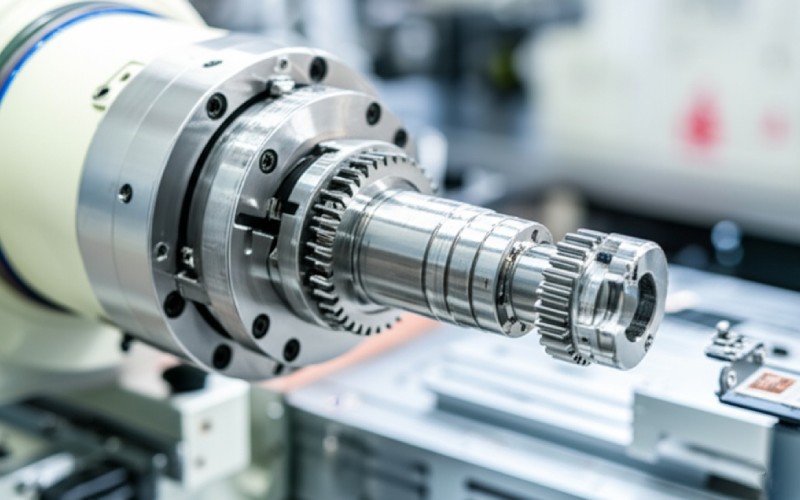
Es gibt auch lineare Servomotoren. Diese bewegen sich in einer geraden Linie und nicht im Kreis. Es gibt auch Servomotoren mit kontinuierlicher Drehung. Diese können sich wie ein normaler Motor rundherum drehen, aber Sie können ihre Geschwindigkeit steuern. Die Wahl des richtigen Servomotors hängt davon ab, was dein Projekt braucht. Denken Sie an die Leistung, die erforderliche Genauigkeit und Ihr Budget. Große CNC-Maschinen verwenden zum Beispiel oft Servomotoren, die starke AC-Servomotoren sind.
Bei vielen herkömmlichen Servos ist der Positionssensor ein Potentiometer. Dies gilt insbesondere für Servos, die in Hobbyprojekten verwendet werden. Ein Potentiometer ist eine Art Widerstand, der sich verändern kann. Es hat einen Drehknopf, den man drehen kann. Wenn du ihn drehst, ändert sich der Wert des elektrischen Widerstands.
Im Motor ist das Potentiometer mit dem letzten Zahnrad verbunden. Wenn sich die Motorwelle dreht, dreht sich auch das Potentiometer. Der Steuerkreis leitet eine Spannung durch das Potentiometer. Dann liest er die Ausgangsspannung ab. Die Ausgangsspannung ist je nach Position der Welle unterschiedlich. So erfährt der Schaltkreis, wo genau sich die Welle gerade befindet. Dies ist eine einfache, aber gute Möglichkeit für das Servosystem, eine Rückmeldung zu erhalten.
Für anspruchsvollere Aufgaben in der Fabrik ist ein Potentiometer möglicherweise nicht genau genug. Für diese Aufgaben verwendet ein Servomotor einen Encoder oder einen Resolver als Sensor.
Ein Encoder ist ein Sensor, der Bewegungen in eine elektrische Nachricht umwandelt. Er kann der Steuerung mehr als nur die Position mitteilen. Er kann auch die Geschwindigkeit und Richtung der Motorwelle melden. Es gibt zwei Haupttypen:
Ein Resolver ist eine andere Art von Sensor. Er ist sehr robust und wird oft an rauen oder schmutzigen Stellen eingesetzt. Genau wie ein Encoder gibt er eine Rückmeldung über die Position der Welle. Beide Sensoren sind viel genauer als ein Potentiometer. Deshalb findet man sie in hochentwickelten Roboter- und Automatisierungsmaschinen.
Nachdem Sie gelernt haben, was ein Servomotor ist, werden Sie ihn an vielen Stellen sehen. Die Liste der Anwendungen von Servomotoren ist sehr lang. Das liegt daran, dass so viele Dinge auf eine sehr genaue Art und Weise bewegt werden müssen.
Hier ein paar Beispiele für den Einsatz von Servos:
Vom ersten Einsatz von Dampf zur Steuerung der Ruder von Schiffen bis hin zur heutigen Robotik ist die Grundidee des Servomechanismus immer noch eine großartige Möglichkeit zur Steuerung einer Maschine.
Als ich anfing zu lernen, habe ich oft Servomotoren und Schrittmotoren verwechselt. Sie werden beide zur Positionssteuerung verwendet. Aber sie erledigen ihre Aufgaben auf sehr unterschiedliche Weise.
Ein Schrittmotor bewegt sich in kleinen, festen Schritten. Er verfügt nicht über einen Rückkopplungsmechanismus. Sie sagen ihm, dass er sich eine bestimmte Anzahl von Schritten bewegen soll, und er tut es einfach. Es handelt sich um ein "Open-Loop"-System, d. h. es macht