Lassen Sie Sino's Lamination Stacks Ihr Projekt verstärken!
Um Ihr Projekt zu beschleunigen, können Sie Lamination Stacks mit Details wie Toleranz, Material, Oberflächengüte, ob eine oxidierte Isolierung erforderlich ist oder nicht, Mengeund mehr.
Wichtigste Erkenntnisse
- Geklebte Blechpakete reduzieren den gemessenen Kernverlust um 8-12% im Vergleich zu geschweißten Paketen und unterdrücken die Drehmomentkomponenten der 6. und 12. harmonischen Verzahnung - ein Unterschied zwischen bestanden und nicht bestanden, wenn die Spezifikation < 0,5% Verzahnung lautet.
- Unterschiedliche Gelenke erfordern unterschiedliche Stähle: 0,20-0,27 mm dünner NOES nach EN 10303 (≤ 15 W/kg @ 1,0 T/400 Hz) für Schulter und Hüfte; 0,10-0,15 mm ultradünner NOES oder mittlere Ni-Legierung für Handgelenk- und Fingeraktoren.
- Die Konsistenz der Zahnspitzenfase von ±0,03 mm über alle Statorzähne wirkt sich stärker auf das Rastmoment aus als das Fasenmaß selbst.
- Dünnwandiges NOES mit 0,20 mm eignet sich für die meisten humanoiden Gelenkmotoren; Co-Fe rechtfertigt seinen 10-20fachen Kostenaufschlag nur selten außerhalb der zweibeinigen Beingelenke.
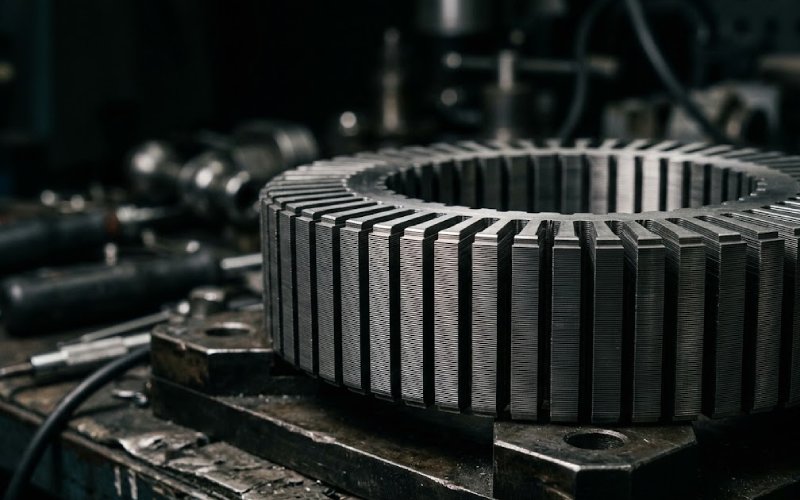
Die Schulter eines humanoiden Roboters muss einen Arm halten, während das Handgelenk eine Nadel einfädelt. Dieselbe Maschine, völlig unterschiedliche Motorprobleme. Und an der Unterseite beider sitzt - im wahrsten Sinne des Wortes - ein Stapel gestanzter Stahlbleche, die dünner sind als eine Visitenkarte.
Wir bauen diese Stacks. Die rahmenlosen PMSM- und hochpoligen BLDC-Torquemotoren in humanoiden Gelenkantrieben gehören zu den anspruchsvollsten Statorblechpaket Anwendungen, die wir ausgeliefert haben. Hier erfahren Sie, was die Produktionsdaten tatsächlich darüber aussagen, welche Lamellenauswahl die Drehmomentwelligkeit, das Rastmoment und die reibungslose Bewegungssteuerung verbessert - und welche Auswahl Geldverschwendung ist.
Die Drehmomentwelligkeit eines Gelenkmotors äußert sich in ruckartigen Bewegungen des Roboters. Natürlich kann der Regelkreis einen Teil davon kompensieren. Aber die elektromagnetische Quelle dieser Welligkeit - Rastmoment, harmonische Verzerrungen, ungleichmäßige Flussverteilung - wird auf der Ebene der Lamellen eingebrannt. Eine schlechte Stahlauswahl, eine schlampige Zahngeometrie, eine falsche Stapelungsmethode und der beste FOC-Algorithmus der Welt werden Sie nicht retten.
Gelenkmotoren für humanoide Roboter - die Art, die Schulter-Drehantriebe mit einer Spitzenleistung von 40-100 Nm oder Kniegelenke mit 100+ Nm antreibt - sind fast immer rahmenlose PMSM- oder hochpolige BLDC-Konstruktionen. Kein Gehäuse. Keine eigenen Lager. Das Statorpaket wird direkt in das Gelenkgehäuse des Roboters gepresst. Jeder Maßfehler im Statorpaket wird zu einem Konzentrizitätsfehler im Motor. Dieser wird zu einer Quelle für Drehmomentschwankungen.
Die Simulation weiß nicht, dass Ihre Schweißnähte die Lamellen kurzschließen.
Wir haben schon Kunden mit hervorragenden FEA-Ergebnissen erlebt, deren Modell < 0,3% Cogging bei Nenndrehmoment anzeigte, und dann 30-40% dieser vorhergesagten Leistung verloren, weil der Stapel nicht flach genug war oder die Klebemethode den Stahl belastete. Die Diskrepanz zwischen Simulation und Realität ist bei Gelenkmotoren fast immer ein Laminierungsproblem.
Nicht jedes Gelenk eines humanoiden Roboters benötigt den gleichen Laminierstahl. Schulter-, Ellbogen- und Handgelenksmotoren identisch zu behandeln, ist ein häufiger Fehler, der entweder Geld oder Leistung kostet - meistens beides. Humanoide Plattformen der aktuellen Generation verfügen über 28-40+ Aktuatoren am gesamten Körper, und die Anforderungen an Drehmoment, Geschwindigkeit und Präzision unterscheiden sich von Gelenk zu Gelenk erheblich.
Diese tragen die schwersten Lasten. Die Anforderungen an das Dauerdrehmoment reichen von 40 Nm bis über 200 Nm, je nach Masse des Roboters. Der Motor arbeitet mit relativ niedrigen Drehzahlen, muss aber hohe Stromdichten über längere Zeit aufrechterhalten, so dass die thermische Leistung von Bedeutung ist.
Für diese hochbelasteten, mäßig frequentierten Verbindungen empfehlen wir in der Regel 0,25-0,35 mm nicht orientiertes Elektroband mit einem Siliziumgehalt von etwa 2,5-3,0%. Für das dünne Ende (0,25-0,27 mm) gilt die folgende Norm EN 10303 / IEC 60404-8-8 - die Dünnspur- und Mittelfrequenzspezifikation - mit Sorten wie NO25-13 (0,25 mm, ≤ 13 W/kg @ 1,0 T/400 Hz) oder NO27-15 (0,27 mm, ≤ 15 W/kg @ 1,0 T/400 Hz). Bei der Option 0,35 mm bewegen Sie sich in der EN 10106 / IEC 60404-8-4 Standard, bei dem Noten wie M270-35A (0,35 mm, ≤ 2,70 W/kg @ 1,5 T/50 Hz) gelten.
Warum die Dickenaufteilung wichtig ist: Ein 10-poliger Motor mit 300 U/min läuft mit einer Grundfrequenz von nur ~50 Hz. Bei dieser Frequenz ist der Unterschied zwischen 0,25 mm und 0,35 mm bei den Wirbelströmen bescheiden. Eine Unterschreitung von 0,20 mm bei Schultergelenken ist nur selten gerechtfertigt - Sie zahlen für eine dünne Dicke, ohne eine proportionale Verlustreduzierung bei diesen niedrigen elektrischen Frequenzen zu erreichen.
Die Permeabilität muss hoch sein, weil das Motordesign die Flussdichte in den Zähnen bei Spitzendrehmoment auf 1,6-1,7 T treibt. Bei Überschreitung dieses Wertes tritt eine Sättigung ein, die die Wellenform der Gegen-EMK verzerrt und die Drehmomentwelligkeit direkt in den Ausgang einspeist.
Drehmoment im mittleren Bereich (10-80 Nm), höhere dynamische Anforderungen. Diese Verbindungen beschleunigen schnell und wechseln häufig die Richtung. Die Priorität der Laminierung verschiebt sich von der reinen thermischen Beständigkeit hin zu geringer Hystereseverlust und hohe Permeabilität bei moderaten Induktionswerten (Betriebsbereich 1,0-1,4 T).
Wir haben gute Ergebnisse mit 0,20-mm-Sorten erzielt - insbesondere NO20-12 nach EN 10303 (≤ 12 W/kg @ 1,0 T/400 Hz). Die wichtigste Erkenntnis aus unseren Produktionsdaten: Wenn man die Permeabilität im Bereich des tatsächlichen Betriebsflusses (und nicht des Spitzenwertes) richtig einstellt, verbessert sich die Rück-EMK-Linearität messbar. Das wirkt sich direkt auf eine sauberere Stromregelung aus. Die Servoschleife erhält ein gleichmäßigeres Drehmoment, mit dem sie arbeiten kann.
Kleine Statoren. Feine Zähne. Sehr enge Schlitze. Die Drehmomentanforderungen sind bescheiden (1-20 Nm), aber die Anforderungen an die Präzision sind extrem - dies sind die Gelenke, die Manipulationsaufgaben erledigen, wie die 22-DOF-Fingerhände auf Plattformen der aktuellen Generation, bei denen 0,1° Positionsfehler wichtig sind.
Hier schieben wir in 0,10-0,15 mm hauchdünne NOES-Sorten (NO10 oder NO15 nach EN 10303) oder für bestimmte High-End-Programme, Nickel-Eisen-Legierungen der Familie 40-50% Ni.
Die Ni-Fe-Option bietet eine phänomenale Permeabilität ($\mur$ > 50.000 bei niedrigem Feld) und nahezu kein Cogging bei den niedrigen Flussdichten, mit denen diese winzigen Motoren arbeiten. Der Nachteil: deutlich höhere Materialkosten, geringere $B{$ (≈ 1,5 T für Ni-Güten 48-50%) und Glühanforderungen, die von der spezifischen Legierungszusammensetzung abhängen:
Bei einem Handgelenkmotor, der insgesamt 80 Gramm wiegt, sind die Mehrkosten für den Stahl im Vergleich zur Gesamtstückliste des Roboters vernachlässigbar. Das Glühen ist jedoch nicht trivial - wählen Sie die Sorte, die der tatsächlich benötigten magnetischen Leistung entspricht, und nicht die exotischste verfügbare Option.
Es ist erwähnenswert: Ni-Fe-Laminate sind empfindlich gegenüber Stanzspannungen. Wir ziehen es vor, diese mit dem Laser auszuschneiden und anschließend einen entsprechenden Glühzyklus durchzuführen. Das progressive Stanzen von Ni-Fe ist möglich - und bei Dicken von 0,15-0,20 mm wird es von einigen Programmen erfolgreich durchgeführt -, aber die Werkzeuge müssen für die Weichheit und Duktilität des Materials optimiert werden, und das Glühen nach dem Stanzen ist noch wichtiger, um die durch die Kaltverformung verlorenen Eigenschaften wiederherzustellen.

| Parameter | Norm NOES 0,35 mm (EN 10106) | Dünne NOES 0,20-0,27 mm (EN 10303) | Ultradünne NOES 0,10-0,15 mm (EN 10303) | Co-Fe-Legierung 0,10-0,20 mm | Ni-Fe 40-50% Ni, 0,10-0,20 mm |
|---|---|---|---|---|---|
| B_sat | 1.7-2.0 T | 1.7-2.0 T | 1.7-2.0 T | 2.3-2.4 T | 1.4-1.6 T |
| Kernverlust @ 1,0 T / 400 Hz | 18-22 W/kg | 12-15 W/kg (0,25 mm); ≤ 12 W/kg (0,20 mm) | ≤ 13 W/kg (0,15 mm); ≤ 13 W/kg (0,10 mm) | Vergleichbar mit dünnen NOES bei gleicher Dicke | Sehr gering (< 5 W/kg typisch bei Betriebsfluss) |
| Durchlässigkeit bei 1,0 T | Gut | Gut-hoch | Gut-hoch | Hoch | Sehr hoch |
| Rastmoment Potenzial | Standard | Verbessert | Weiter verbessert | Verbessert | Am besten |
| Stempeln Schwierigkeitsgrad | Einfach; Folgeverbundwerkzeug bei 200-600 SPM | Mäßig; Gratkontrolle kritisch | Hart; Grat-zu-Dicke-Verhältnis anspruchsvoll | Hart; kerbempfindlich, anfällig für Risse | Hart; spannungsempfindliches, weiches Material |
| Post-Stempel-Glühen | Wahlweise SRA @ 750°C N₂ | Empfohlen | Empfohlen | Obligatorisch - Vakuum oder H₂ | Obligatorisch - Temperatur/Atmosphäre je nach Klasse (siehe Text oben) |
| Relative Materialkosten | 1× | 1.5-2× | 2-3× | 10-20× | 3-8× |
| Typische Fugenanwendung | Schulter, Hüfte (bei Niederfrequenzoperationen sind 0,35 mm ausreichend) | Schulter, Hüfte, Ellbogen, Knie (der Arbeitsbereich für die meisten Gelenke) | Handgelenk, Finger, Präzisionseffektoren | Gewichtskritische Beingelenke auf bipedalen Gehplattformen | Handgelenk, Finger, Ultrapräzisionsaktoren |
| Stack-Montage | Verriegeln oder schweißen | Verklebung oder Verriegelung | Bonding (empfohlen) | Bonding (stressfrei obligatorisch) | Kleben oder Klemmen (keine Schweißung) |
Die Werte für den Kernverlust stellen garantierte Höchstwerte gemäß EN 10303:2015 und EN 10106:2015 dar, sofern zutreffend, oder verifizierte Bereiche aus unserer Epstein-Eingangsprüfung für Nicht-Standardgüten.
Um die Überlappung bei 0,20 mm zu verdeutlichen: Dieses Maß liegt genau an der Grenze. Für Gelenke, bei denen die elektrische Grundfrequenz unter ~100 Hz bleibt (die meisten Schulter-/Hüftanwendungen), fangen 0,25 mm oder sogar 0,35 mm den größten Teil der Verlustreduzierung auf und sind leichter zu stanzen. Für Ellbogen-/Kniegelenke mit höheren dynamischen Anforderungen und Frequenzen von 200-400 Hz sind 0,20 mm der Sweet Spot. Wir verwenden standardmäßig 0,20 mm, wenn ein Motorentwicklungsteam die Spurweite noch nicht festgelegt hat, weil dies den größten Spielraum über den Bereich der für humanoide Gelenke typischen Betriebsbedingungen bietet.
Die Art und Weise, wie Sie die Laminate zusammenhalten, ist nicht nur eine strukturelle Entscheidung. Es ist eine elektromagnetische Entscheidung. Hier sehen wir die meisten “freien Leistungen”, die von Teams auf dem Tisch liegen gelassen werden, die den Stahl richtig hinbekommen, aber die Stapelung verpfuschen.
Laser- oder WIG-Schweißnähte entlang des Außendurchmessers des Stapels erzeugen lokale Kurzschlüsse zwischen benachbarten Lamellen. Die wärmebeeinflusste Zone verschlechtert die Isolationsbeschichtung und erhöht die interlaminare Leitfähigkeit. Bei unseren Tests an 0,20 mm dicken NOES-Stapeln (Güteklasse NO20-12) erhöhte eine Lasernaht mit vier Nähten den gemessenen Kernverlust um etwa 8-12% im Vergleich zu demselben Stapel, der mit Klebstoff verbunden war.
Dieser zusätzliche Verlust ist nicht gleichmäßig verteilt. Er konzentriert sich in der Nähe der Schweißlinien. Je nach Platzierung der Schweißnaht im Verhältnis zur Position des Schlitzes führt dies zu einer asymmetrischen Erwärmung und bringt zusätzliche Oberwellen in die Flussmittelverteilung ein. Wir haben dies mit einer FFT der Cogging-Wellenform gemessen - die 6. und 12. harmonischen Komponenten nehmen bei geschweißten Stapeln gegenüber geklebten Stapeln deutlich zu.
Bei Industriemotoren kümmert sich niemand darum. Bei einem Gelenkmotor, bei dem die Spezifikation ein Rastmoment < 0,5% des Nenndrehmoments vorschreibt, kann dies den Unterschied zwischen Bestehen und Nichtbestehen ausmachen.
Aus elektromagnetischer Sicht besser als Schweißen - keine Hitzeschäden. Aber die Vertiefungen in der Verriegelung erzeugen lokale Verformungen im Stahl. Jede Vertiefung ist ein Punkt mit erhöhter Eigenspannung, die den lokalen Hystereseverlust erhöht.
Bei Statoren mit kleinem Durchmesser (alles unter ~60 mm Außendurchmesser, was die meisten Hand- und Ellbogengelenke abdeckt) gibt es oft nicht genug Rückeisen, um Verriegelungen anzubringen, ohne den Magnetkreis zu beeinträchtigen. Wir haben Fälle gesehen, in denen die Platzierung von Interlocks im Jochbereich eines 40-mm-Stators eine messbare Asymmetrie der Flussdichte im Luftspalt verursachte.
Selbstklebender Lack (Backlack) - klassifiziert als Typ C-3 per EN 10342 / IEC 60404-1-1 / ASTM A976 Isolierbeschichtungsnormen - oder nach dem Stempeln aufgetragener Klebstoff ergibt Stapel mit:
Unsere Klebstoffschichtdicke: 2-5 μm pro Schnittstelle. Dadurch bleibt der Stapelfaktor über 97%. Dickere Klebeschichten fressen den aktiven Stahlanteil auf und können die Drehmomentdichte um 2-3% verringern.
Geklebte Stapel laufen auch leiser. Der Klebstoff zwischen den Schichten dämpft das hochfrequente Brummen, das geschweißte oder verriegelte Stapel in die Roboterstruktur übertragen. Bei einem kollaborierenden Roboter, der in der Nähe von Menschen arbeitet, ist das hörbare Brummen von Motorenkernen ein echtes UX-Problem. Kleben beseitigt es.
Konzentrierte Wicklungskonstruktionen mit hoher Polzahl (16+ Pole) sind der Standard für Gelenkmomentmotoren. Gängige Paarungen wie 12-Nut/10-Pol oder 24-Nut/22-Pol unterdrücken von Natur aus Oberschwingungen niedriger Ordnung. Aber das Blechpaket muss die Geometrie immer noch den Spezifikationen entsprechend ausführen.
Wir haben festgestellt, dass ein paar Dinge wichtiger sind, als es das Lehrbuch vermuten lässt:
Anfasen der Zahnspitze. Wir fügen routinemäßig 0,2-0,4 mm Fasen an den Zahnspitzen der Statorbleche für Robotermotoren hinzu. In der FEA reduziert dies das Rastmoment um 15-25% bei typischen hochpoligen Designs. Die Verbesserung tritt jedoch nur dann ein, wenn die Fase über alle Zähne hinweg mit einer Genauigkeit von ±0,03 mm gleichmäßig ist. Inkonsistente Fasen können sogar erhöhen. weil sie eine geometrische Asymmetrie einführen, für die das Fractional-Slot-Design nicht ausgelegt ist.
Kontrolle der Grathöhe. Bei 0,20-mm-Laminaten beträgt unsere Produktionsvorgabe ≤ 10 μm Grathöhe. Jeder Mikrometer Grat ist ein potenzieller interlaminarer Kontaktpunkt, der die Isolierung verschlechtert und Wirbelstrompfade erzeugt. Bei dünnerem Material (0,10-0,15 mm) wird das Verhältnis von Grat zu Dicke schnell aggressiv.
Bei Stärken unter 0,15 mm wechseln wir in der Regel zum Faserlaserschneiden - vor allem, weil wir damit eine bessere Gratkontrolle haben und der Verschleiß der Matrize als Variable entfällt. Das progressive Stanzen von 0,10 mm NOES ist machbar (das Material verträgt Schlitz-, Scher- und Stanzvorgänge bei Raumtemperatur), aber die Aufrechterhaltung einer konstanten Grathöhe von unter 10 μm über einen kompletten Produktionslauf erfordert aggressive Werkzeugwartungspläne, die für die meisten Programme unpraktisch sind. Je nach Volumen und Komplexität der Geometrie variiert der Aufwand.
Breite der Schlitzöffnung. Enge Öffnungen verringern das Rastmoment, erschweren aber die Wicklung und führen zu Wärmestaus. Der Sweet Spot für Gelenkmotoren liegt im Bereich von 40-80 mm Stator-AD: typischerweise 1,5-2,5 mm. Die Laminierwerkzeuge müssen diese Abmessung auf ±0,02 mm über jeden Schlitz einhalten, sonst wird die Oberwellenunterdrückung durch das Fractional-Slot-Design teilweise zunichte gemacht.
Schiefe Lamellenpakete reduzieren das Rastmoment, indem sie die magnetische Wechselwirkung über einen größeren Winkelbereich verteilen. Das funktioniert. Aber es ist nicht kostenlos.
Eine kontinuierliche Schrägstellung um eine Schlitzteilung eliminiert praktisch die fundamentale Cogging-Komponente. Sie reduziert auch das durchschnittliche Drehmoment um 1-3% und erschwert die Wicklung.
Für hochpolige Gelenkmotoren mit fraktionierten Nuten verlangen die meisten Programme Halbschlitz oder teilweiser Versatz - genug, um das Restcogging zu verringern, ohne dass das Drehmoment darunter leidet. Wir implementieren dies als gestufte Schräglage mit 2-4 relativ zueinander gedrehten Teilstapeln.
Unsere Standardfunktion: 2-Schritt- oder 3-Schritt-Schräglauf mit einer Winkelgenauigkeit von ±0,3° pro Schritt. Für engere Spezifikationen: 4-stufige Konfigurationen mit ±0,15° - erfordert kundenspezifische Vorrichtungen und verursacht zusätzliche Kosten.
Eine Wechselwirkung, die nicht oft genug diskutiert wird: Schräglage und Stapelverfahren. Bei geschweißten Stapeln mit gestuftem Versatz entstehen Spannungskonzentrationen an jeder Schnittstelle zwischen Schweißnaht und Schritt. Geklebte Stapel kommen mit dem leichten Winkelversatz gut zurecht, da der Klebstoff ihn ohne harte Kontaktpunkte aufnimmt.
Amorphe und nanokristalline Werkstoffe: Warum (noch) nicht?
Gelegentlich werden wir nach amorphen Metallbändern für Gelenkmotoren gefragt. Die Zahlen zum Kernverlust sind spektakulär - bei einer Dicke von ~0,025 mm sinkt der Verlust um 70-90% gegenüber NOES bei vergleichbaren Bedingungen. Die praktischen Probleme sind jedoch erheblich: - Der Stapelfaktor sinkt auf 80-85%. Sie verlieren aktives magnetisches Material, weil das Band ~25 μm dick ist und proportional mehr Beschichtung/Luft pro Höheneinheit aufweist. - Zerbrechlichkeit. Das Stanzen komplexer Statorgeometrien mit feinen Zähnen ist im Produktionsmaßstab nahezu unmöglich. Laserschneiden funktioniert, aber die Wärmeeinflusszone lässt das Material teilweise kristallisieren, was die Eigenschaften verschlechtert. - B_sat ≈ 1,56 T - praktikabel, aber niedriger als NOES. Für das gleiche Drehmoment wird ein größerer Kern benötigt, was den Verlustvorteil teilweise zunichte macht. Für Transformatorkerne und bestimmte Axialfluss-Topologien mit einfachen Wickelformen ist ein amorpher Kern sinnvoll. Für die rahmenlosen Radialfluss-Torquemotoren, die bei humanoiden Gelenkanwendungen vorherrschen, ist dies heute nicht praktikabel. Dünnwandige NOES mit gebondetem Stacking bieten 80% des theoretischen Nutzens bei 20% der Prozessschwierigkeiten.

Vorlaufzeit für Prototypen: 7-15 Arbeitstage. Produktion: 6-8 Wochen.
Beim Stanzen kommt es zu plastischen Verformungen an den Schnittkanten und um die geformten Merkmale herum. Bei Ni-Fe-Legierungen erhöht selbst mäßige Kaltverformung die Koerzitivfeldstärke und kann die Permeabilität im Vergleich zum vollständig geglühten Zustand um 50-80% verringern. Durch das Glühen wird das Korngefüge rekristallisiert, Versetzungen werden beseitigt und der Zustand niedriger Koerzitivfeldstärke und hoher Permeabilität, für den die Legierung entwickelt wurde, wird wiederhergestellt. Die genaue Temperatur und Atmosphäre hängen von der Sorte ab: eine 42% Ni-Legierung erholt sich gut bei 850-1000°C in einer Standard-Schutzatmosphäre, während eine hochpermeable 49% Ni-Sorte 1100°C+ in trockenem Wasserstoff mit kontrollierter Abkühlung benötigt, um ihre Nennpermeabilität zu erreichen. Wer beim Glühen spart, hat teuren Stahl, der wie billiger NOES wirkt.
Ein typischer humanoider Gelenkmotor könnte 10 Polpaare haben, die mit 0-500 RPM laufen. Das entspricht einer Grundfrequenz von 0-83 Hz. Selbst bei dynamischen Spitzenwerten von 1.500 RPM erreicht man ~250 Hz. Vergleichen Sie das mit einem EV-Fahrmotor bei 15.000 U/min mit 4 Polpaaren: 1.000 Hz Grundfrequenz. Die niedrigere Frequenz bei Gelenkmotoren bedeutet, dass die Wirbelstrombeeinträchtigung durch dickere Lamellen proportional geringer ist. Wenn man bei einem Gelenkmotor von 0,35 mm auf 0,20 mm wechselt, kann man 15-20% an Kernverlusten einsparen. Wenn man von 0,20 mm auf 0,10 mm wechselt, kann man weitere 8-10% einsparen - aber der Aufwand beim Stanzen und die Kostensteigerung sind erheblich. Passen Sie die Spurweite an die tatsächliche Frequenz an, nicht an das dünnste verfügbare Material.
Unserer Erfahrung nach kommt es mehr auf die Konsistenz als auf die exakte Abfasung an. Eine gleichmäßige 0,3-mm-Fase mit ±0,03 mm über alle Zähne ist einer 0,5-mm-Fase mit ±0,08 mm Abweichung überlegen. Die Abweichung führt zu einer asymmetrischen Reluktanz, die Oberschwingungen erzeugt, die durch die Fractional-Slot-Topologie nicht ausgeglichen werden sollen. Wir halten die Fasen-Toleranz enger, als die meisten Anbieter sie vorgeben.
Nein. Die Schrägstellung unterdrückt zwar die Grundschwingungskomponente, aber die Oberschwingungen höherer Ordnung (6., 12., 18.), die von geometrischen Asymmetrien herrühren - Grate, ungleichmäßige Schlitzöffnungen, falsch ausgerichtete Schlösser - werden durch die Schrägstellung nur teilweise gedämpft. Sie benötigen immer noch enge Toleranzen bei der Laminierung. Schräglage ist eine zusätzliche Maßnahme und kein Ersatz für Präzisionsstanzen.
Gehen Sie von der Flussdichtekarte Ihres FEA-Modells und dem Betriebsfrequenzbereich aus. Definieren Sie den zulässigen Kernverlust in W/kg an einem repräsentativen Betriebspunkt (z. B. 1,0 T/400 Hz gemäß EN 10303-Testbedingungen oder bei einer Frequenz, die dem Arbeitszyklus Ihres Motors entspricht). Geben Sie neben dem Material auch die Methode der Stapelmontage an - dies sind gekoppelte Entscheidungen. Wenn Sie uns in die Designschleife einbeziehen, bevor Sie Material, Dicke und Stapelmontagemethode festlegen, können wir in der Regel Möglichkeiten zur Kostensenkung identifizieren, ohne die elektromagnetische Leistung zu beeinträchtigen. Nach dem Einfrieren des Designs werden wir zu einem Anbieter, der eine festgelegte Spezifikation ausführt. Davor sind wir ein technischer Partner.
Wenn Sie Gelenkmotoren für ein humanoides Roboterprogramm entwickeln und Lamellenpakete benötigen, die tatsächlich die von der FEA versprochenen Werte für Rastmoment und Welligkeit erreichen, Kontaktieren Sie unser Ingenieurteam. Wir prüfen Ihre Motorkonstruktion, empfehlen ein Material und einen Stapelungsansatz und erstellen ein Angebot für Prototypen bis hin zu Produktionsmengen.







